Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlockPuzzle - A Challenge in Physical Reasoning and Generalization for Robot Learning
Paper and Code
Nov 30, 2018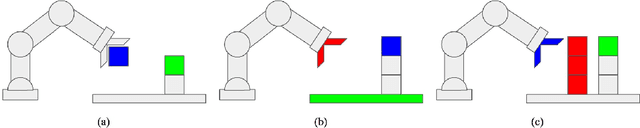
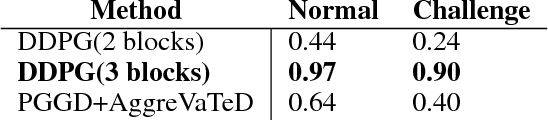
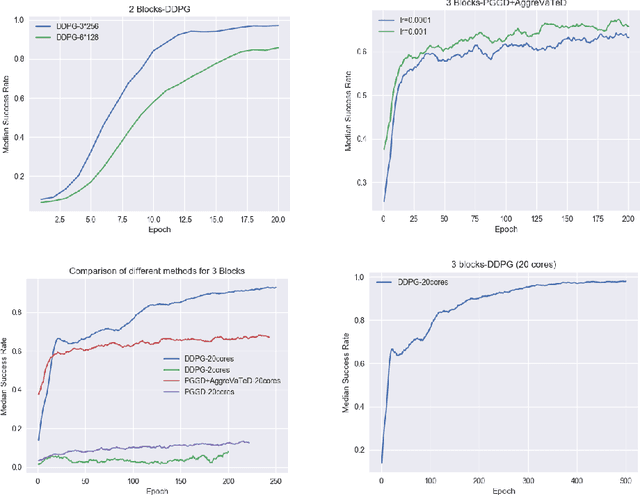
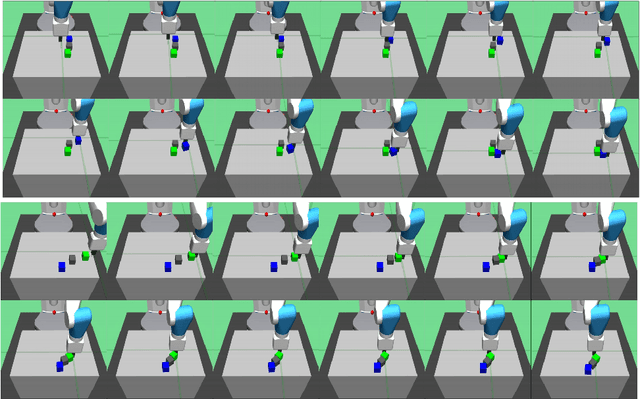
In this work we propose a novel task framework under which a variety of physical reasoning puzzles can be constructed using very simple rules. Under sparse reward settings, most of these tasks can be very challenging for a reinforcement learning agent to learn. We build several simple environments with this task framework in Mujoco and OpenAI gym and attempt to solve them. We are able to solve the environments by designing curricula to guide the agent in learning and using imitation learning methods to transfer knowledge from a simpler environment. This is only a first step for the task framework, and further research on how to solve the harder tasks and transfer knowledge between tasks is needed.
View paper on