 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Tether-based UAV Motion Primitives
Paper and Code
Apr 16, 2019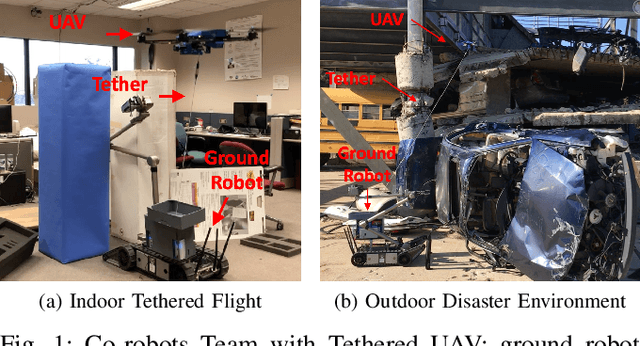
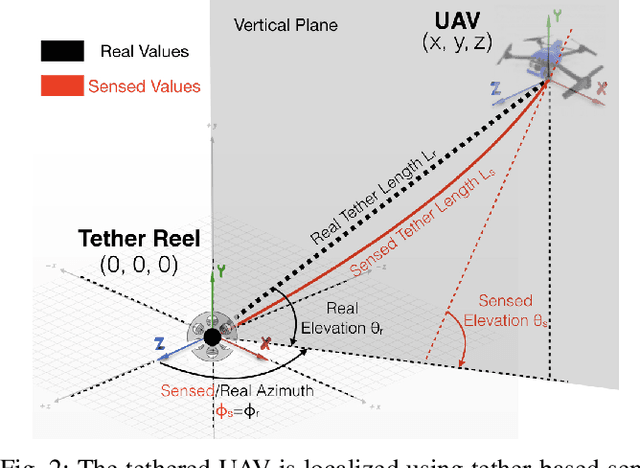
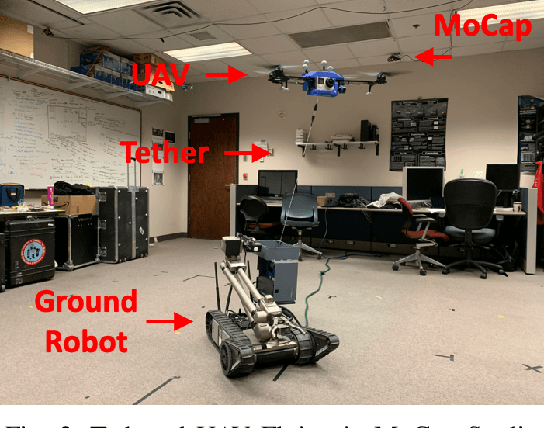
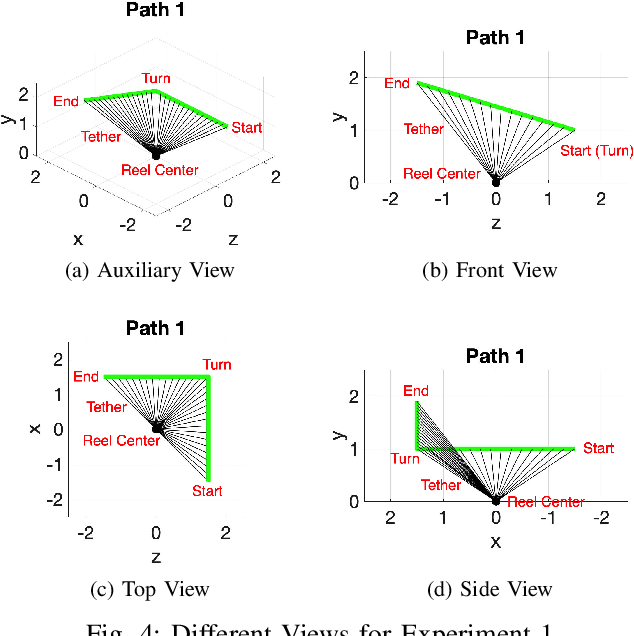
This paper proposes and benchmarks two tether-based motion primitives for tethered UAVs to execute autonomous flight with proprioception only. Tethered UAVs have been studied mainly due to power and safety considerations. Tether is either not included in the UAV motion (treated same as free-flying UAV) or only in terms of station-keeping and high-speed steady flight. However, feedback from and control over the tether configuration could be utilized as a set of navigational tools for autonomous flight, especially in GPS-denied environments and without vision-based exteroception. In this work, two tether-based motion primitives are proposed, which can enable autonomous flight of a tethered UAV. The proposed motion primitives are implemented on a physical tethered UAV for autonomous path execution with motion capture ground truth. The navigational performance is quantified and compared. The proposed motion primitives make tethered UAV a mobile and safe autonomous robot platform. The benchmarking results suggest appropriate usage of the two motion primitives for tethered UAVs with different path plans.