Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Ingress of a UAV through a window using Monocular Vision
Paper and Code
Jul 24, 2016

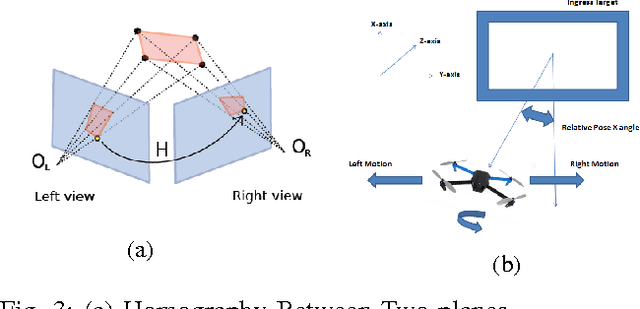
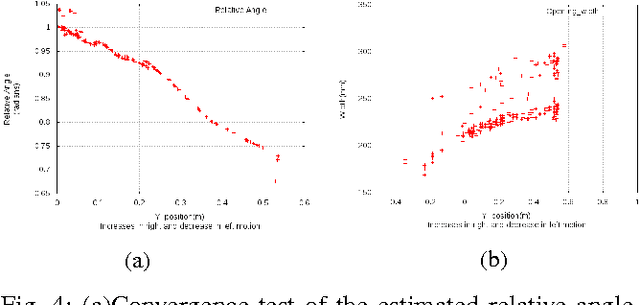
The use of autonomous UAVs for surveillance purposes and other reconnaissance tasks is increasingly becoming popular and convenient.These tasks requires the ability to successfully ingress through the rectangular openings or windows of the target structure.In this paper, a method to robustly detect the window in the surrounding using basic image processing techniques and efficient distance measure, is proposed.Furthermore, a navigation scheme which incorporates this detection method for performing navigation task has also been proposed.The whole navigation task is performed and tested in the simulation environment GAZEBO.
View paper on