 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Control of a Particle Accelerator using Deep Reinforcement Learning
Paper and Code
Oct 16, 2020
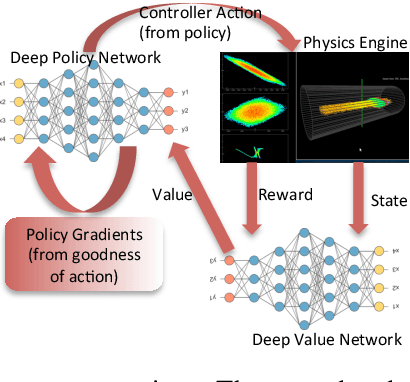

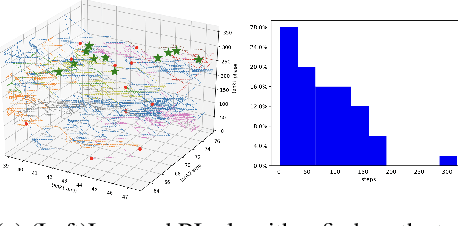
We describe an approach to learning optimal control policies for a large, linear particle accelerator using deep reinforcement learning coupled with a high-fidelity physics engine. The framework consists of an AI controller that uses deep neural nets for state and action-space representation and learns optimal policies using reward signals that are provided by the physics simulator. For this work, we only focus on controlling a small section of the entire accelerator. Nevertheless, initial results indicate that we can achieve better-than-human level performance in terms of particle beam current and distribution. The ultimate goal of this line of work is to substantially reduce the tuning time for such facilities by orders of magnitude, and achieve near-autonomous control.