Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Estimation of Sphere Centers from Images of Calibrated Cameras
Paper and Code
Feb 24, 2020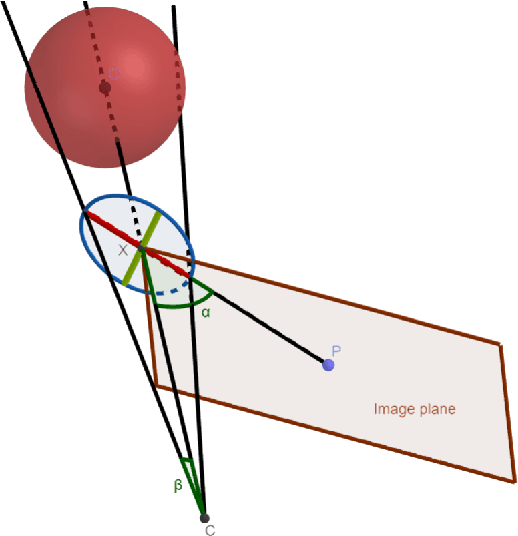
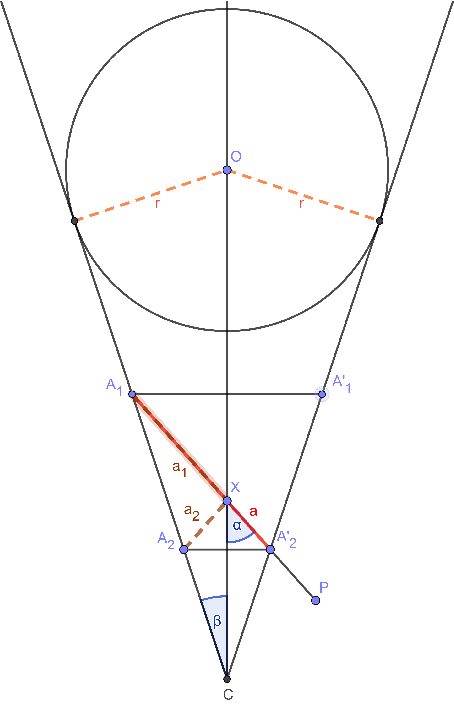
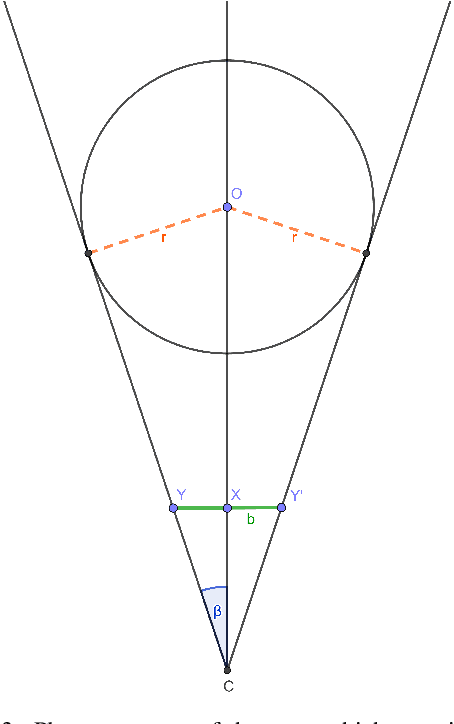
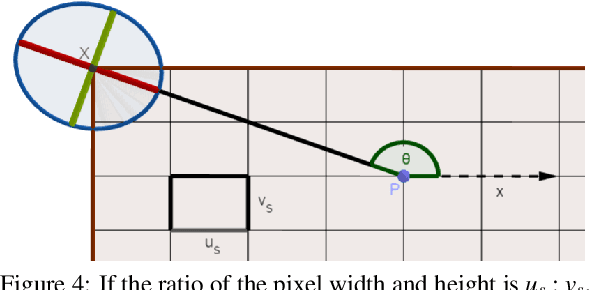
Calibration of devices with different modalities is a key problem in robotic vision. Regular spatial objects, such as planes, are frequently used for this task. This paper deals with the automatic detection of ellipses in camera images, as well as to estimate the 3D position of the spheres corresponding to the detected 2D ellipses. We propose two novel methods to (i) detect an ellipse in camera images and (ii) estimate the spatial location of the corresponding sphere if its size is known. The algorithms are tested both quantitatively and qualitatively. They are applied for calibrating the sensor system of autonomous cars equipped with digital cameras, depth sensors and LiDAR devices.
View paper on