Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic differentiation of Sylvester, Lyapunov, and algebraic Riccati equations
Paper and Code
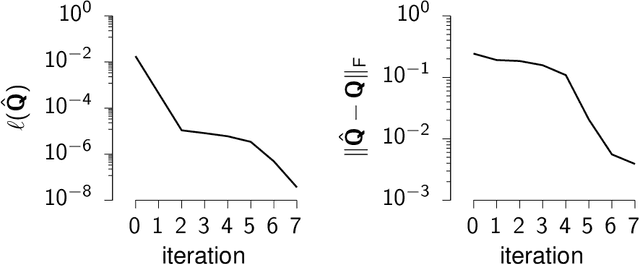
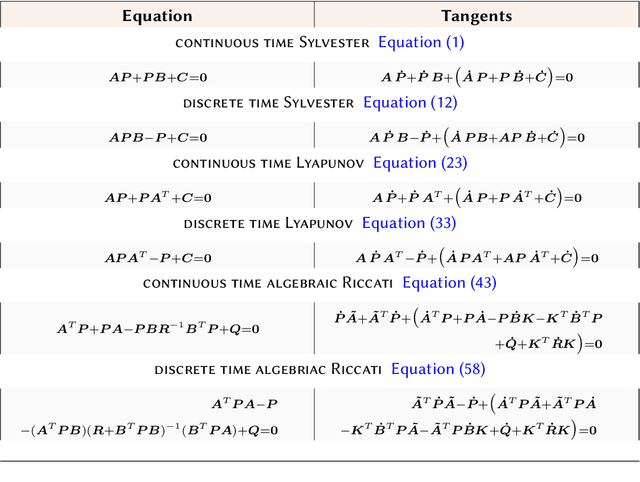
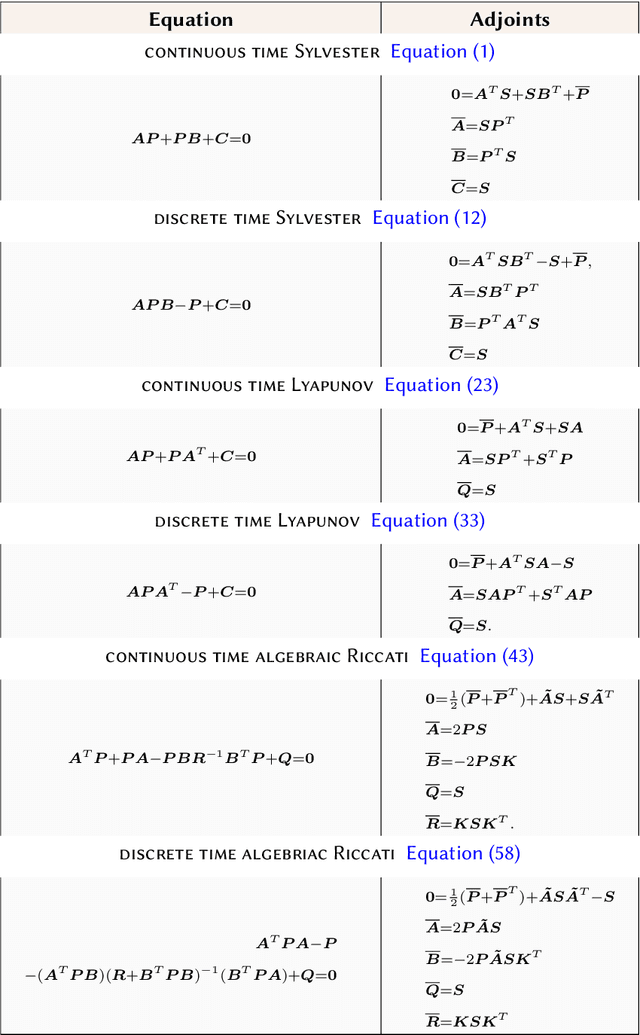
Sylvester, Lyapunov, and algebraic Riccati equations are the bread and butter of control theorists. They are used to compute infinite-horizon Gramians, solve optimal control problems in continuous or discrete time, and design observers. While popular numerical computing frameworks (e.g., scipy) provide efficient solvers for these equations, these solvers are still largely missing from most automatic differentiation libraries. Here, we derive the forward and reverse-mode derivatives of the solutions to all three types of equations, and showcase their application on an inverse control problem.
View paper on