Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Speed and Lane Change Decision Making using Deep Reinforcement Learning
Paper and Code
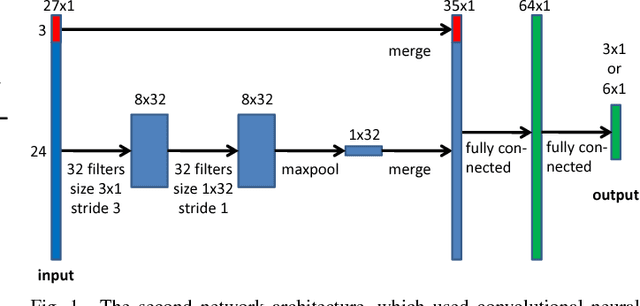
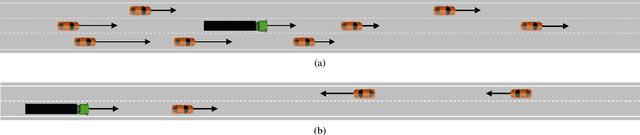
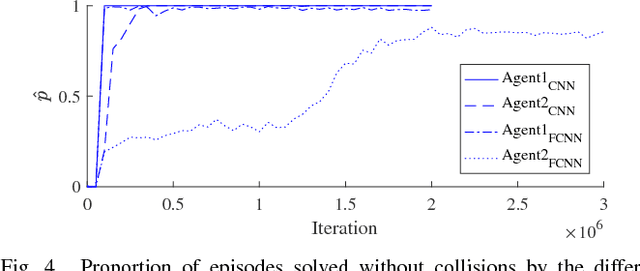
This paper introduces a method, based on deep reinforcement learning, for automatically generating a general purpose decision making function. A Deep Q-Network agent was trained in a simulated environment to handle speed and lane change decisions for a truck-trailer combination. In a highway driving case, it is shown that the method produced an agent that matched or surpassed the performance of a commonly used reference model. To demonstrate the generality of the method, the exact same algorithm was also tested by training it for an overtaking case on a road with oncoming traffic. Furthermore, a novel way of applying a convolutional neural network to high level input that represents interchangeable objects is also introduced.
View paper on