 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Map Reading: Image Based Localisation in 2-D Maps Using Binary Semantic Descriptors
Paper and Code
Mar 02, 2018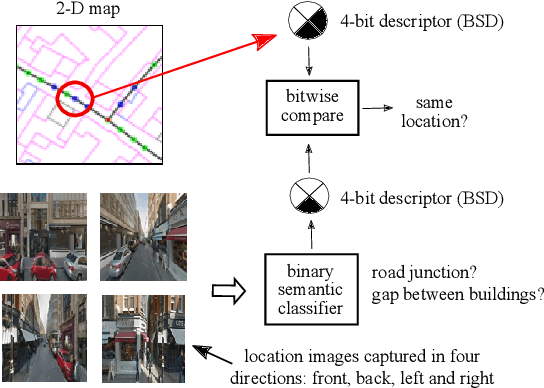
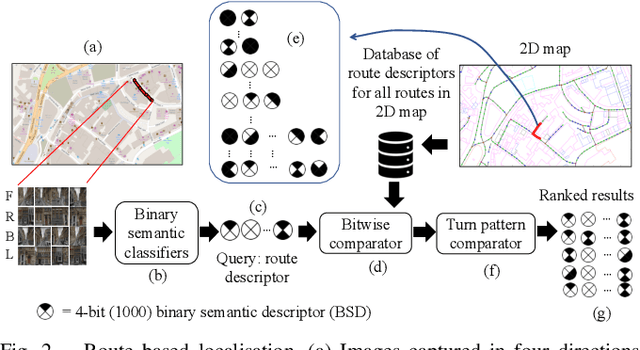
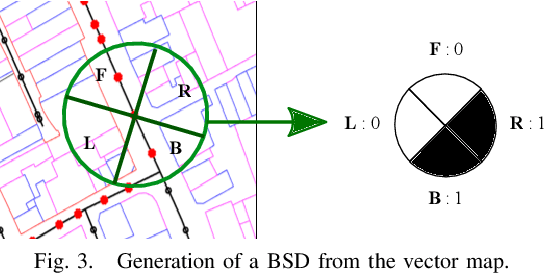
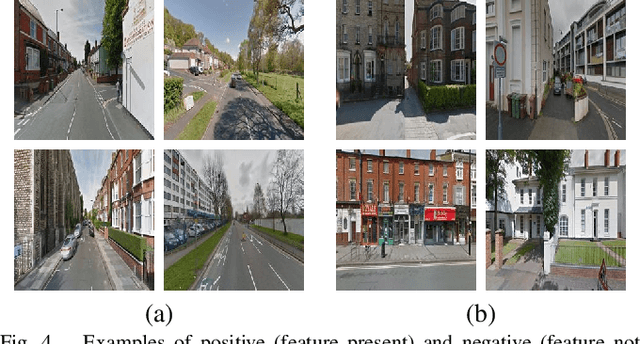
We describe a novel approach to image based localisation in urban environments using semantic matching between images and a 2-D map. It contrasts with the vast majority of existing approaches which use image to image database matching. We use highly compact binary descriptors to represent semantic features at locations, significantly increasing scalability compared with existing methods and having the potential for greater invariance to variable imaging conditions. The approach is also more akin to human map reading, making it more suited to human-system interaction. The binary descriptors indicate the presence or not of semantic features relating to buildings and road junctions in discrete viewing directions. We use CNN classifiers to detect the features in images and match descriptor estimates with a database of location tagged descriptors derived from the 2-D map. In isolation, the descriptors are not sufficiently discriminative, but when concatenated sequentially along a route, their combination becomes highly distinctive and allows localisation even when using non-perfect classifiers. Performance is further improved by taking into account left or right turns over a route. Experimental results obtained using Google StreetView and OpenStreetMap data show that the approach has considerable potential, achieving localisation accuracy of around 85% using routes corresponding to approximately 200 meters.