 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated classification of pre-defined movement patterns: A comparison between GNSS and UWB technology
Paper and Code
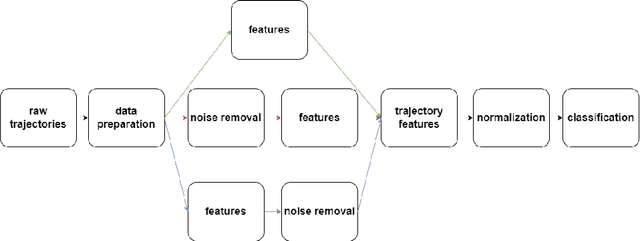



Advanced real-time location systems (RTLS) allow for collecting spatio-temporal data from human movement behaviours. Tracking individuals in small areas such as schoolyards or nursing homes might impose difficulties for RTLS in terms of positioning accuracy. However, to date, few studies have investigated the performance of different localisation systems regarding the classification of human movement patterns in small areas. The current study aims to design and evaluate an automated framework to classify human movement trajectories obtained from two different RTLS: Global Navigation Satellite System (GNSS) and Ultra-wideband (UWB), in areas of approximately 100 square meters. Specifically, we designed a versatile framework which takes GNSS or UWB data as input, extracts features from these data and classifies them according to the annotated spatial patterns. The automated framework contains three choices for applying noise removal: (i) no noise removal, (ii) Savitzky Golay filter on the raw location data or (iii) Savitzky Golay filter on the extracted features, as well as three choices regarding the classification algorithm: Decision Tree (DT), Random Forest (RF) or Support Vector Machine (SVM). We integrated different stages within the framework with the Sequential Model-Based Algorithm Configuration (SMAC) to perform automated hyperparameter optimisation. The best performance is achieved with a pipeline consisting of noise removal applied to the raw location data with an RF model for the GNSS and no noise removal with an SVM model for the UWB. We further demonstrate through statistical analysis that the UWB achieves significantly higher results than the GNSS in classifying movement patterns.