 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAudiovisual Speaker Tracking using Nonlinear Dynamical Systems with Dynamic Stream Weights
Paper and Code
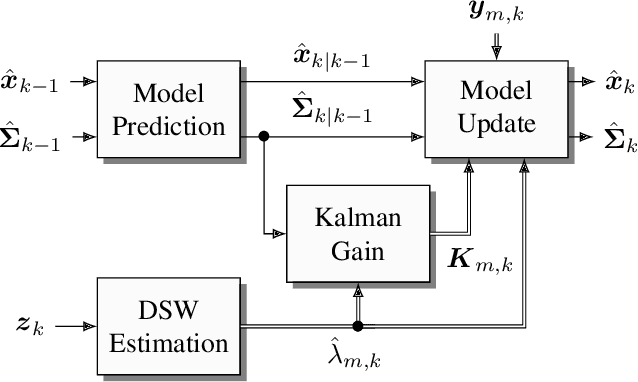
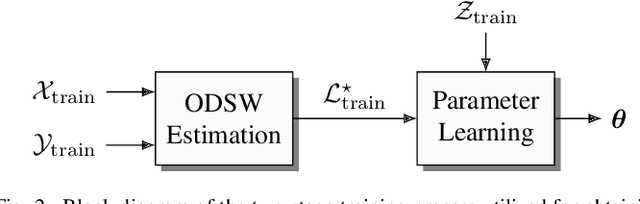
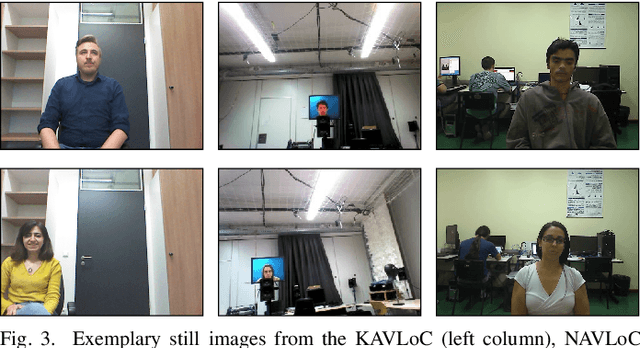
Data fusion plays an important role in many technical applications that require efficient processing of multimodal sensory observations. A prominent example is audiovisual signal processing, which has gained increasing attention in automatic speech recognition, speaker localization and related tasks. If appropriately combined with acoustic information, additional visual cues can help to improve the performance in these applications, especially under adverse acoustic conditions. A dynamic weighting of acoustic and visual streams based on instantaneous sensor reliability measures is an efficient approach to data fusion in this context. This paper presents a framework that extends the well-established theory of nonlinear dynamical systems with the notion of dynamic stream weights for an arbitrary number of sensory observations. It comprises a recursive state estimator based on the Gaussian filtering paradigm, which incorporates dynamic stream weights into a framework closely related to the extended Kalman filter. Additionally, a convex optimization approach to estimate oracle dynamic stream weights in fully observed dynamical systems utilizing a Dirichlet prior is presented. This serves as a basis for a generic parameter learning framework of dynamic stream weight estimators. The proposed system is application-independent and can be easily adapted to specific tasks and requirements. A study using audiovisual speaker tracking tasks is considered as an exemplary application in this work. An improved tracking performance of the dynamic stream weight-based estimation framework over state-of-the-art methods is demonstrated in the experiments.