 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention-based Adversarial Appearance Learning of Augmented Pedestrians
Paper and Code
Jul 06, 2021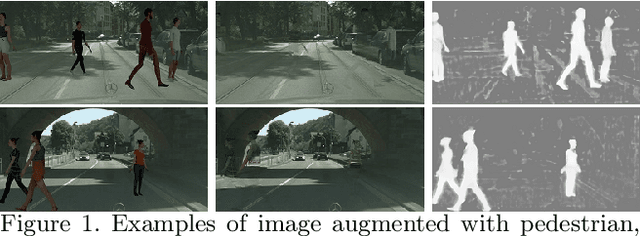
Synthetic data became already an essential component of machine learning-based perception in the field of autonomous driving. Yet it still cannot replace real data completely due to the sim2real domain shift. In this work, we propose a method that leverages the advantages of the augmentation process and adversarial training to synthesize realistic data for the pedestrian recognition task. Our approach utilizes an attention mechanism driven by an adversarial loss to learn domain discrepancies and improve sim2real adaptation. Our experiments confirm that the proposed adaptation method is robust to such discrepancies and reveals both visual realism and semantic consistency. Furthermore, we evaluate our data generation pipeline on the task of pedestrian recognition and demonstrate that generated data resemble properties of the real domain.