 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsymmetric Dual-Arm Task Execution using an Extended Relative Jacobian
Paper and Code
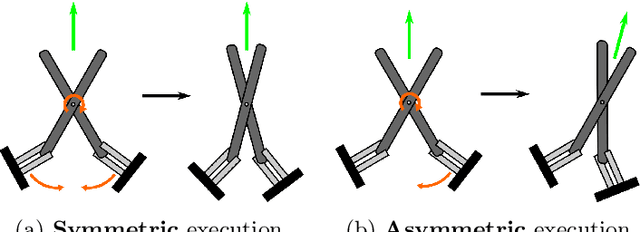

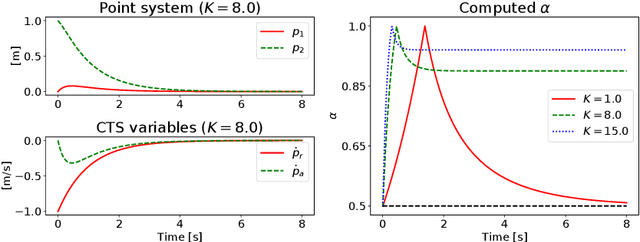

Coordinated dual-arm manipulation tasks can be broadly characterized as possessing absolute and relative motion components. Relative motion tasks, in particular, are inherently redundant in the way they can be distributed between end-effectors. In this work, we analyse cooperative manipulation in terms of the asymmetric resolution of relative motion tasks. We discuss how existing approaches enable the asymmetric execution of a relative motion task, and show how an asymmetric relative motion space can be defined. We leverage this result to propose an extended relative Jacobian to model the cooperative system, which allows a user to set a concrete degree of asymmetry in the task execution. This is achieved without the need for prescribing an absolute motion target. Instead, the absolute motion remains available as a functional redundancy to the system. We illustrate the properties of our proposed Jacobian through numerical simulations of a novel differential Inverse~Kinematics algorithm.