 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssociating Uncertainty to Extended Poses for on Lie Group IMU Preintegration with Rotating Earth
Paper and Code
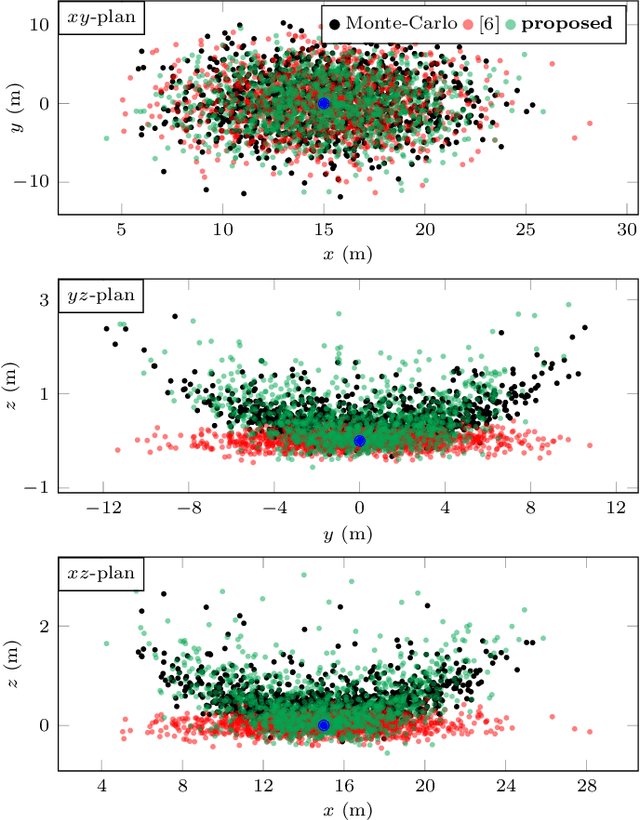
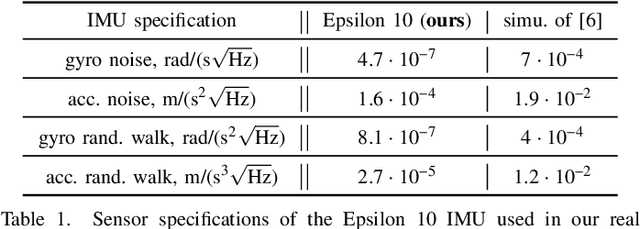
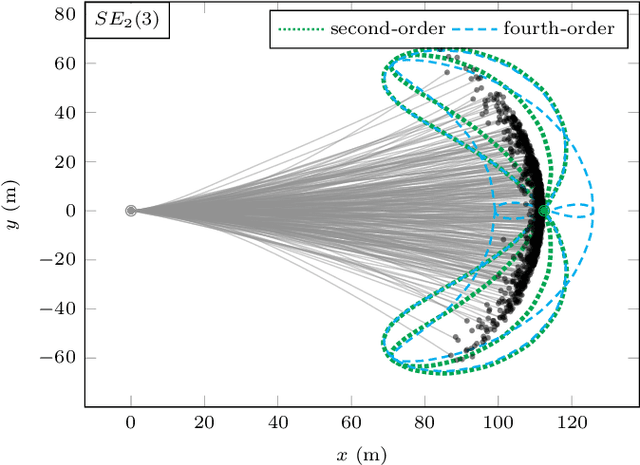
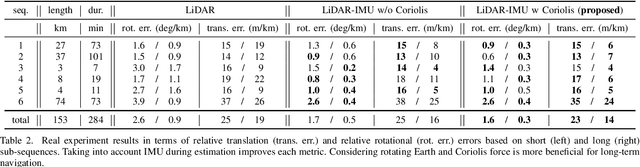
The recently introduced matrix group SE2(3) provides a 5x5 matrix representation for the orientation, velocity and position of an object in the 3-D space, a triplet we call ''extended pose''. In this paper we build on this group to develop a theory to associate uncertainty with extended poses represented by 5x5 matrices. Our approach is particularly suited to describe how uncertainty propagates when the extended pose represents the state of an Inertial Measurement Unit (IMU). In particular it allows revisiting the theory of IMU preintegration on manifold and reaching a further theoretic level in this field. Exact preintegration formulas that account for rotating Earth, that is, centrifugal force and Coriolis force, are derived as a byproduct, and the factors are shown to be more accurate. The approach is validated through extensive simulations and applied to sensor-fusion where a loosely-coupled fixed-lag smoother fuses IMU and LiDAR on one hour long experiments using our experimental car. It shows how handling rotating Earth may be beneficial for long-term navigation within incremental smoothing algorithms.