 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial Hormone Reaction Networks: Towards Higher Evolvability in Evolutionary Multi-Modular Robotics
Paper and Code
Nov 17, 2010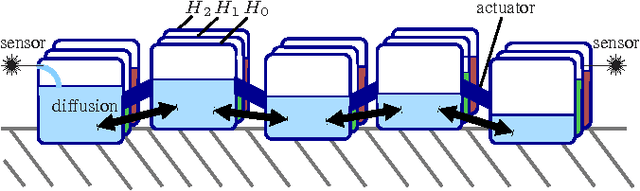
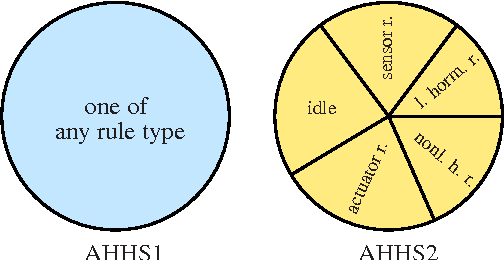
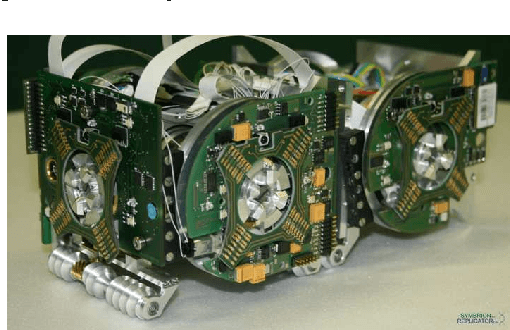
The semi-automatic or automatic synthesis of robot controller software is both desirable and challenging. Synthesis of rather simple behaviors such as collision avoidance by applying artificial evolution has been shown multiple times. However, the difficulty of this synthesis increases heavily with increasing complexity of the task that should be performed by the robot. We try to tackle this problem of complexity with Artificial Homeostatic Hormone Systems (AHHS), which provide both intrinsic, homeostatic processes and (transient) intrinsic, variant behavior. By using AHHS the need for pre-defined controller topologies or information about the field of application is minimized. We investigate how the principle design of the controller and the hormone network size affects the overall performance of the artificial evolution (i.e., evolvability). This is done by comparing two variants of AHHS that show different effects when mutated. We evolve a controller for a robot built from five autonomous, cooperating modules. The desired behavior is a form of gait resulting in fast locomotion by using the modules' main hinges.