 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre We Ready for Robust and Resilient SLAM? A Framework For Quantitative Characterization of SLAM Datasets
Paper and Code
Feb 23, 2022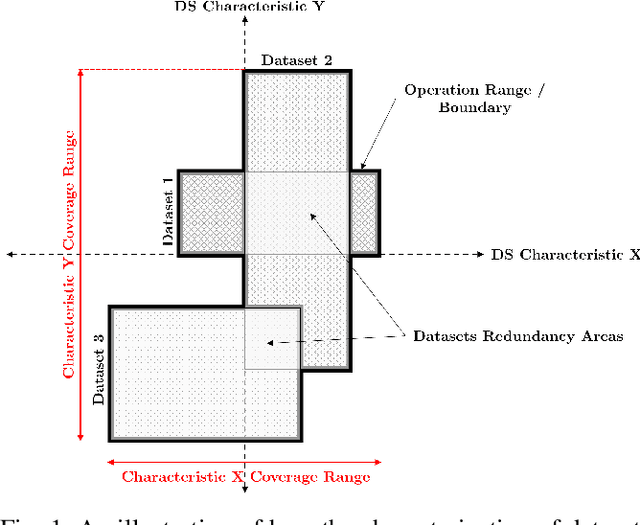

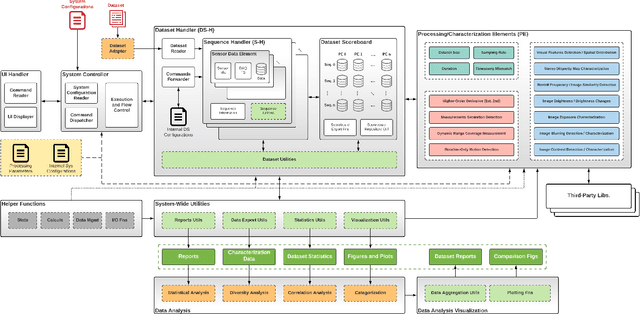
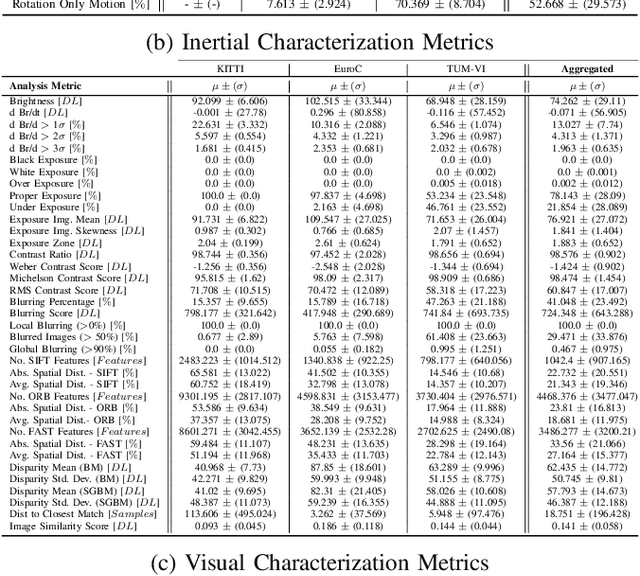
Reliability of SLAM systems is considered one of the critical requirements in many modern autonomous systems. This directed the efforts to developing many state-of-the-art systems, creating challenging datasets, and introducing rigorous metrics to measure SLAM system performance. However, the link between datasets and performance in the robustness/resilience context has rarely been explored. In order to fill this void, characterization the operating conditions of SLAM systems is essential in order to provide an environment for quantitative measurement of robustness and resilience. In this paper, we argue that for proper evaluation of SLAM performance, the characterization of SLAM datasets serves as a critical first step. The study starts by reviewing previous efforts for quantitative characterization of SLAM datasets. Then, the problem of perturbations characterization is discussed and the linkage to SLAM robustness/resilience is established. After that, we propose a novel, generic and extendable framework for quantitative analysis and comparison of SLAM datasets. Additionally, a description of different characterization parameters is provided. Finally, we demonstrate the application of our framework by presenting the characterization results of three SLAM datasets: KITTI, EuroC-MAV, and TUM-VI highlighting the level of insights achieved by the proposed framework.