 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication Layer Definition and Analyses of Controller Area Network Bus for Wire Harness Assembly Machine
Paper and Code
Aug 31, 2006
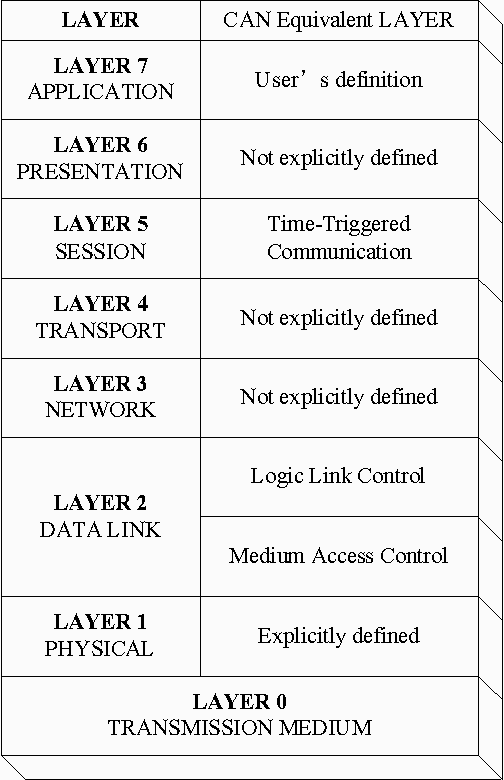
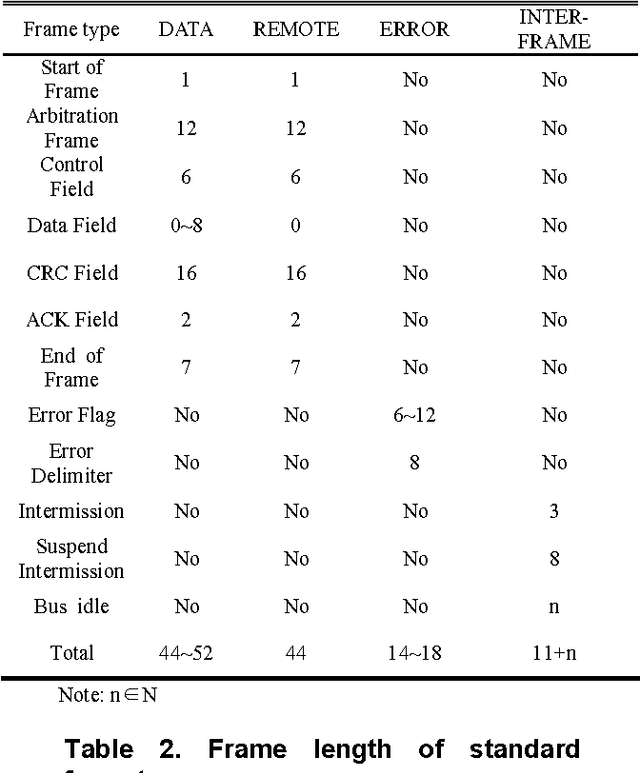
With the feature of multi-master bus access, nondestructive contention-based arbitration and flexible configuration, Controller Area Network (CAN) bus is applied into the control system of Wire Harness Assembly Machine (WHAM). To accomplish desired goal, the specific features of the CAN bus is analyzed by compared with other field buses and the functional performances in the CAN bus system of WHAM is discussed. Then the application layer planning of CAN bus for dynamic priority is presented. The critical issue for the use of CAN bus system in WHAM is the data transfer rate between different nodes. So processing efficient model is introduced to assist analyzing data transfer procedure. Through the model, it is convenient to verify the real time feature of the CAN bus system in WHAM.