 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnyMorph: Learning Transferable Polices By Inferring Agent Morphology
Paper and Code
Jun 17, 2022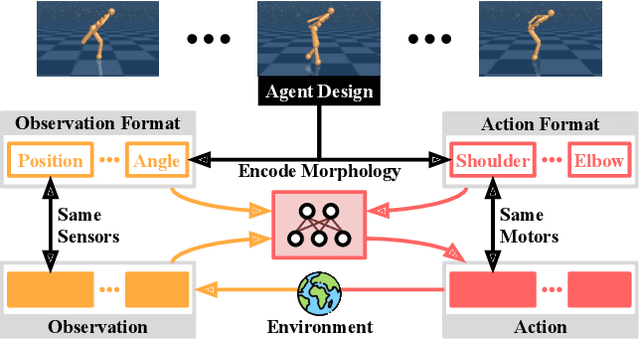

The prototypical approach to reinforcement learning involves training policies tailored to a particular agent from scratch for every new morphology. Recent work aims to eliminate the re-training of policies by investigating whether a morphology-agnostic policy, trained on a diverse set of agents with similar task objectives, can be transferred to new agents with unseen morphologies without re-training. This is a challenging problem that required previous approaches to use hand-designed descriptions of the new agent's morphology. Instead of hand-designing this description, we propose a data-driven method that learns a representation of morphology directly from the reinforcement learning objective. Ours is the first reinforcement learning algorithm that can train a policy to generalize to new agent morphologies without requiring a description of the agent's morphology in advance. We evaluate our approach on the standard benchmark for agent-agnostic control, and improve over the current state of the art in zero-shot generalization to new agents. Importantly, our method attains good performance without an explicit description of morphology.