 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis and Control of Fiber-Reinforced Elastomeric Enclosures (FREEs)
Paper and Code
Dec 13, 2019
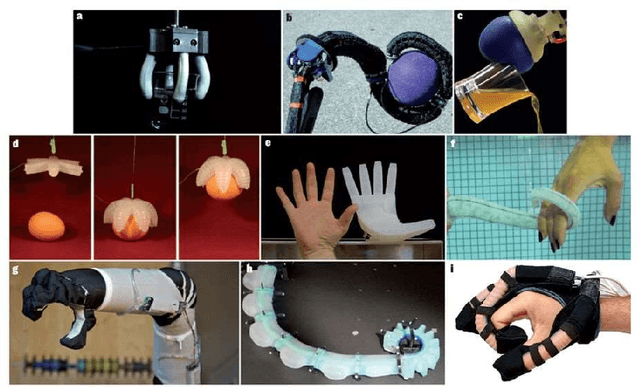
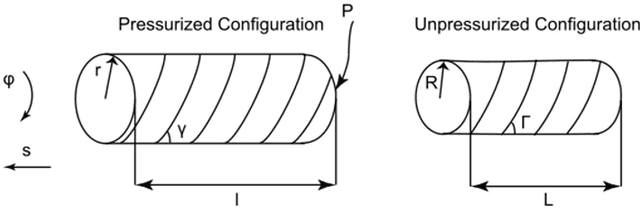
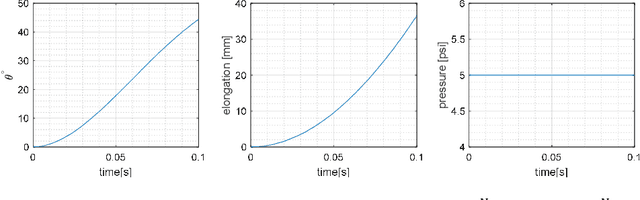
While rigid robots are extensively used in various applications, they are limited in the tasks they can perform and can be unsafe in close human-robot interactions. Soft robots on the other hand surpass the capabilities of rigid robots in several ways, such as compatibility with the work environments, degrees of freedom, manufacturing costs, and safe interactions with the environment. This thesis studies the behavior of Fiber Reinforced Elastomeric Enclosures (FREEs) as a particular type of soft pneumatic actuator that can be used in soft manipulators. A dynamic lumped-parameter model is created to simulate the motion of a single FREE under various operating conditions and to inform the design of a controller. The proposed PID controller determines the response of the FREE to a defined step input or a trajectory following polynomial function, using rotation angle to control the orientation of the end-effector. Additionally, Finite Element Analysis method is employed, incorporating the inherently nonlinear material properties of FREEs, to precisely evaluate various parameters and configurations of FREEs. This tool is also used to determine the workspace of multiple FREEs in a module, which is essentially a building block of a soft robotic arm.