 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Optimal Control Approach to Deep Learning and Applications to Discrete-Weight Neural Networks
Paper and Code
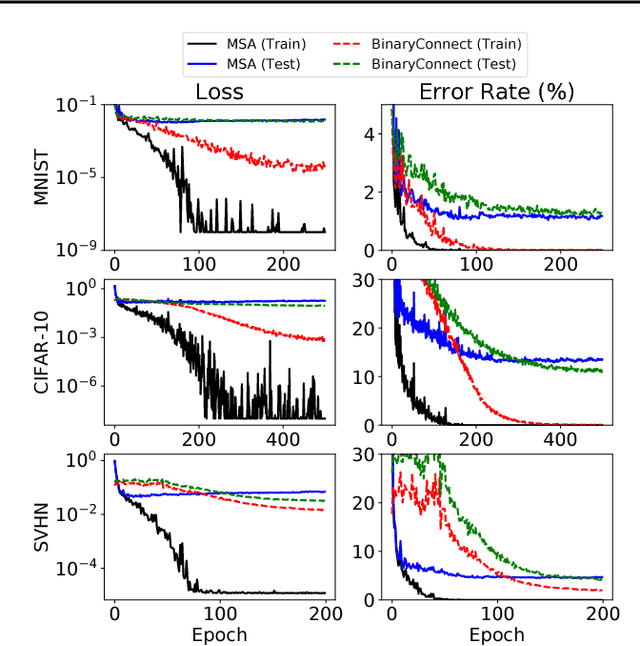
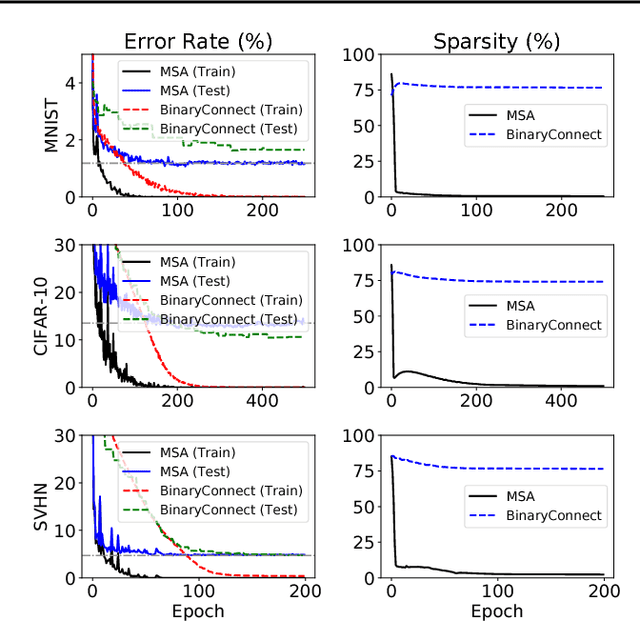
Deep learning is formulated as a discrete-time optimal control problem. This allows one to characterize necessary conditions for optimality and develop training algorithms that do not rely on gradients with respect to the trainable parameters. In particular, we introduce the discrete-time method of successive approximations (MSA), which is based on the Pontryagin's maximum principle, for training neural networks. A rigorous error estimate for the discrete MSA is obtained, which sheds light on its dynamics and the means to stabilize the algorithm. The developed methods are applied to train, in a rather principled way, neural networks with weights that are constrained to take values in a discrete set. We obtain competitive performance and interestingly, very sparse weights in the case of ternary networks, which may be useful in model deployment in low-memory devices.