 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Open-source Hardware/Software Architecture and Supporting Simulation Environment to Perform Human FPV Flight Demonstrations for Unmanned Aerial Vehicle Autonomy
Paper and Code
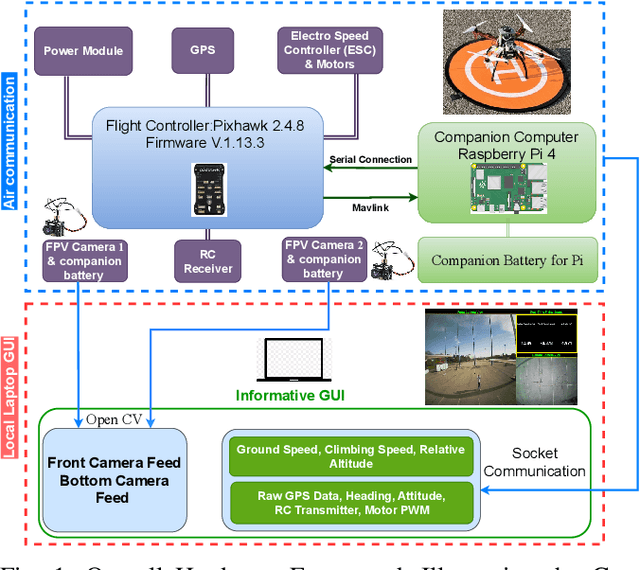
Small multi-rotor unmanned aerial vehicles (UAVs), mainly quadcopters, are nowadays ubiquitous in research on aerial autonomy, including serving as scaled-down models for much larger aircraft such as vertical-take-off-and-lift vehicles for urban air mobility. Among the various research use cases, first-person-view RC flight experiments allow for collecting data on how human pilots fly such aircraft, which could then be used to compare, contrast, validate, or train autonomous flight agents. While this could be uniquely beneficial, especially for studying UAV operation in contextually complex and safety-critical environments such as in human-UAV shared spaces, the lack of inexpensive and open-source hardware/software platforms that offer this capability along with low-level access to the underlying control software and data remains limited. To address this gap and significantly reduce barriers to human-guided autonomy research with UAVs, this paper presents an open-source software architecture implemented with an inexpensive in-house built quadcopter platform based on the F450 Quadcopter Frame. This setup uses two cameras to provide a dual-view FPV and an open-source flight controller, Pixhawk. The underlying software architecture, developed using the Python-based Kivy library, allows logging telemetry, GPS, control inputs, and camera frame data in a synchronized manner on the ground station computer. Since costs (time) and weather constraints typically limit numbers of physical outdoor flight experiments, this paper also presents a unique AirSim/Unreal Engine based simulation environment and graphical user interface aka digital twin, that provides a Hardware In The Loop setup via the Pixhawk flight controller. We demonstrate the usability and reliability of the overall framework through a set of diverse physical FPV flight experiments and corresponding flight tests in the digital twin.