 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Information Theoretic Measure for Robot Expressivity
Paper and Code
Jul 17, 2017

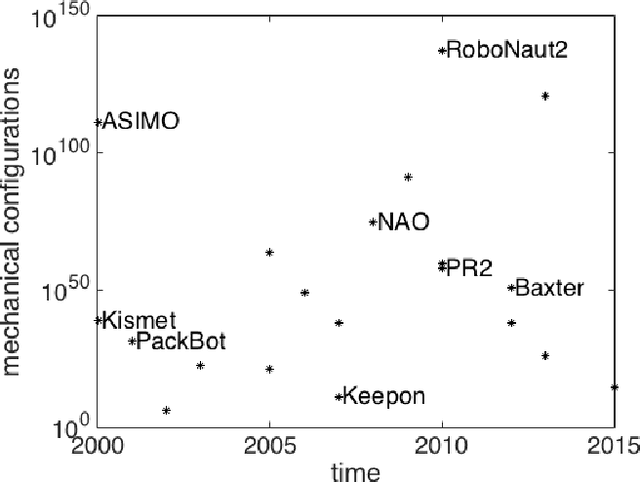
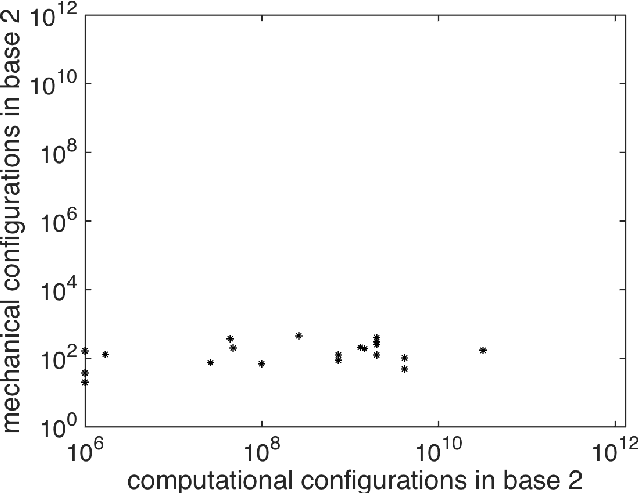
This paper presents a principled way to think about articulated movement for artificial agents and a measurement of platforms that produce such movement. In particular, in human-facing scenarios, the shape evolution of robotic platforms will become essential in creating systems that integrate and communicate with human counterparts. This paper provides a tool to measure the expressive capacity or expressivity of articulated platforms. To do this, it points to the synergistic relationship between computation and mechanization. Importantly, this way of thinking gives an information theoretic basis for measuring and comparing robots of increasing complexity and capability. The paper will provide concrete examples of this measure in application to current robotic platforms. It will also provide a comparison between the computational and mechanical capabilities of robotic platforms and analyze order-of-magnitude trends over the last 15 years. Implications for future work made by the paper are to provide a method by which to quantify movement imitation, outline a way of thinking about designing expressive robotic systems, and contextualize the capabilities of current robotic systems.