 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn imminent collision monitoring system with safe stopping interventions for autonomous aerial flights
Paper and Code
Jun 17, 2022
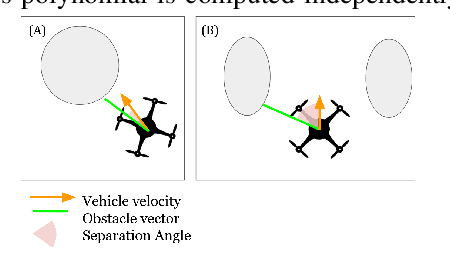

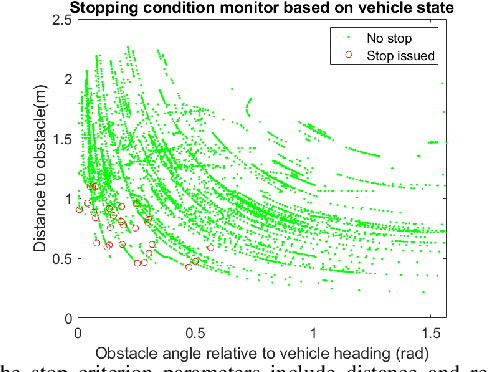
Collision avoidance requires tradeoffs in planning time horizons. Depending on the planner, safety cannot always be guaranteed in uncertain environments given map updates. To mitigate situations where the planner leads the vehicle into a state of collision or the vehicle reaches a point where no trajectories are feasible, we propose a continuous collision checking algorithm. The imminent collision checking system continuously monitors vehicle safety, and plans a safe trajectory that leads the vehicle to a stop within the observed map. We test our proposed pipeline alongside a teleoperated navigation in real-life experiments, and in simulated random-forest and warehouse environments where we show that with our method, we are able to mitigate collisions with a success rate of at least 90\%.