 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Accelerator for Deep Learning-based Point Cloud Registration on FPGAs
Paper and Code
Mar 11, 2022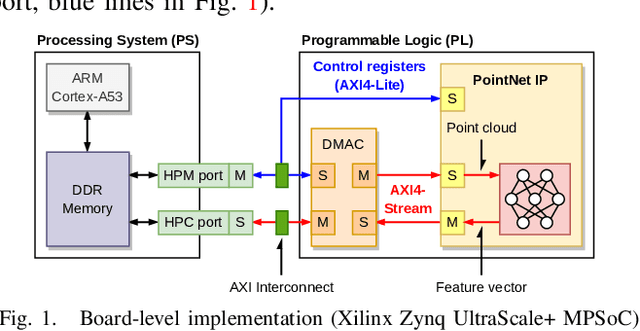
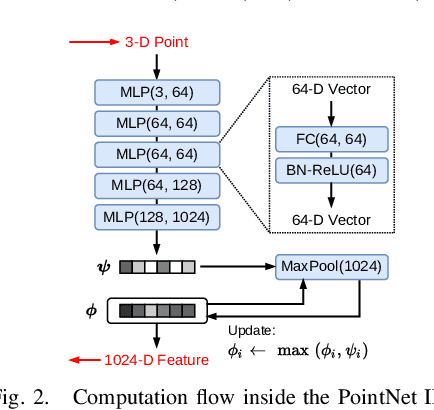
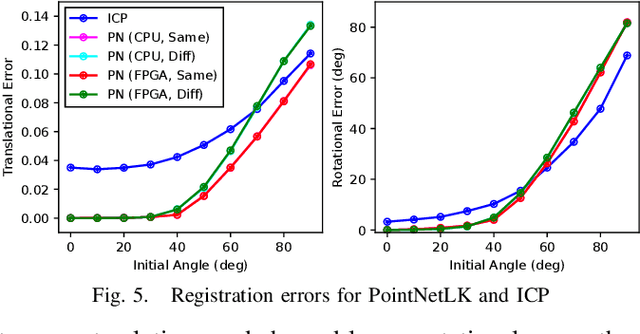
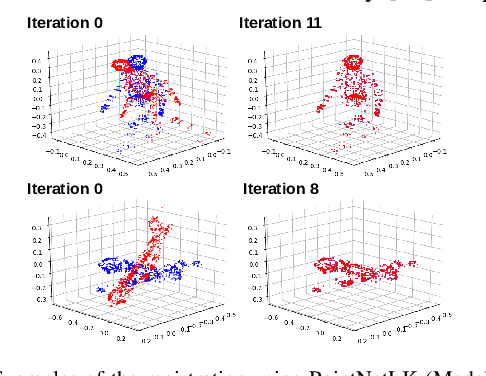
Point cloud registration is the basis for many robotic applications such as odometry and Simultaneous Localization And Mapping (SLAM), which are increasingly important for autonomous mobile robots. Computational resources and power budgets are limited on these robots, thereby motivating the development of resource-efficient registration method on low-cost FPGAs. In this paper, we propose a novel approach for FPGA-based 3D point cloud registration built upon a recent deep learning-based method, PointNetLK. A highly-efficient FPGA accelerator for PointNet-based feature extraction is designed and implemented on both low-cost and mid-range FPGAs (Avnet Ultra96v2 and Xilinx ZCU104). Our accelerator design is evaluated in terms of registration speed, accuracy, resource usage, and power consumption. Experimental results show that PointNetLK with our accelerator achieves up to 21.34x and 69.60x faster registration speed than the CPU counterpart and ICP, respectively, while only consuming 722mW and maintaining the same level of accuracy.