 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Autonomous Driving Framework for Long-term Decision-making and Short-term Trajectory Planning on Frenet Space
Paper and Code
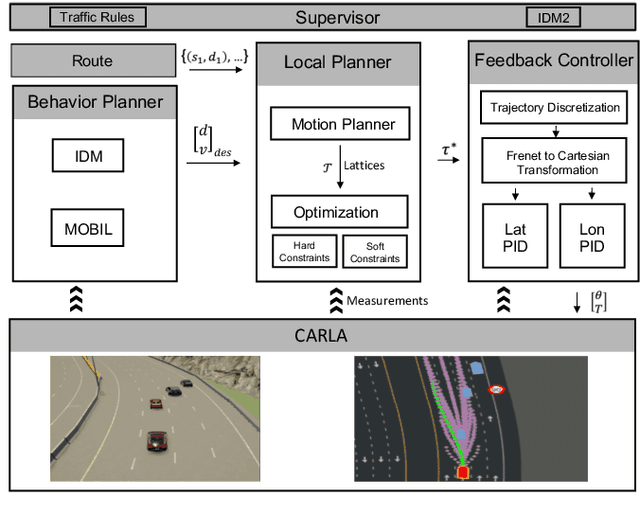
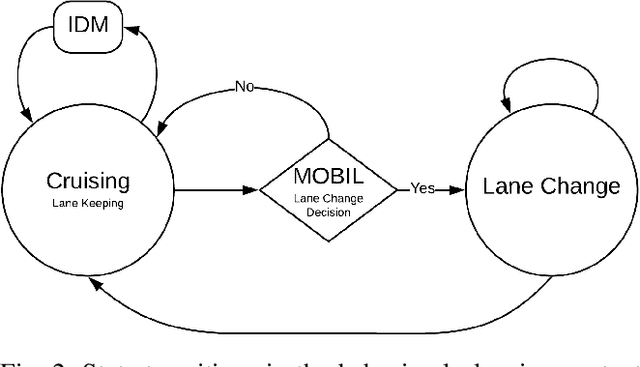
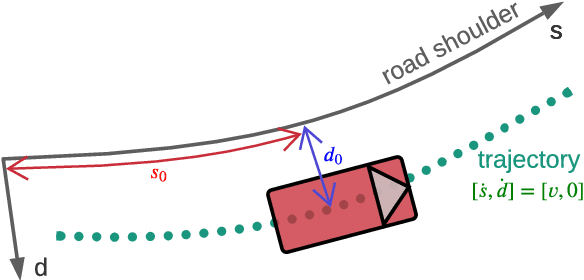
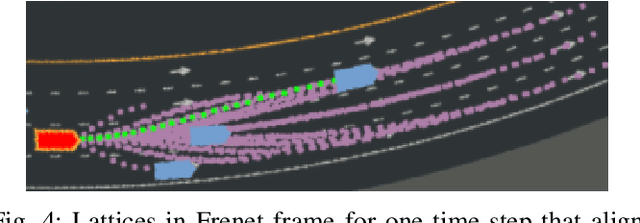
In this paper, we present a hierarchical framework for decision-making and planning on highway driving tasks. We utilized intelligent driving models (IDM and MOBIL) to generate long-term decisions based on the traffic situation flowing around the ego. The decisions both maximize ego performance while respecting other vehicles' objectives. Short-term trajectory optimization is performed on the Frenet space to make the calculations invariant to the road's three-dimensional curvatures. A novel obstacle avoidance approach is introduced on the Frenet frame for the moving obstacles. The optimization explores the driving corridors to generate spatiotemporal polynomial trajectories to navigate through the traffic safely and obey the BP commands. The framework also introduces a heuristic supervisor that identifies unexpected situations and recalculates each module in case of a potential emergency. Experiments in CARLA simulation have shown the potential and the scalability of the framework in implementing various driving styles that match human behavior.