Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Algorithmic Solution to the Five-Point Pose Problem Based on the Cayley Representation of Rotations
Paper and Code
Feb 02, 2013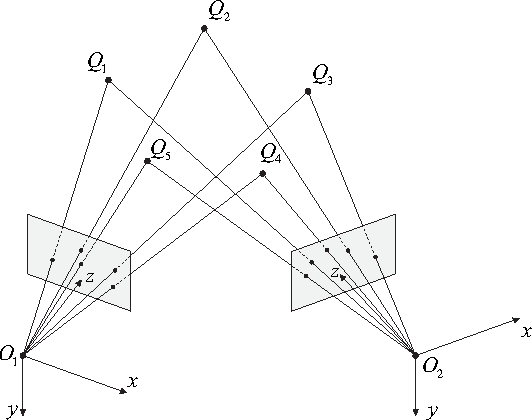
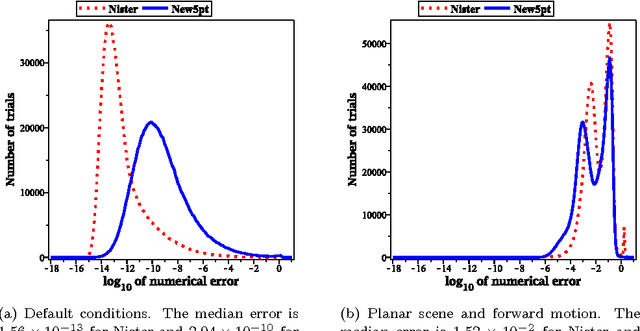
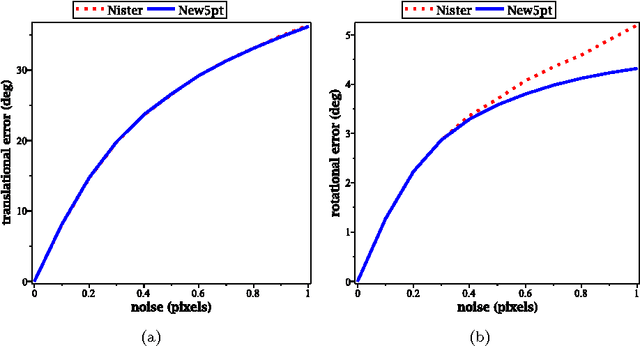
We give a new algorithmic solution to the well-known five-point relative pose problem. Our approach does not deal with the famous cubic constraint on an essential matrix. Instead, we use the Cayley representation of rotations in order to obtain a polynomial system from epipolar constraints. Solving that system, we directly get relative rotation and translation parameters of the cameras in terms of roots of a 10th degree polynomial.
* 9 pages, 5 figures
View paper on