 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAggressive saliency-aware point cloud compression
Paper and Code
Jul 20, 2023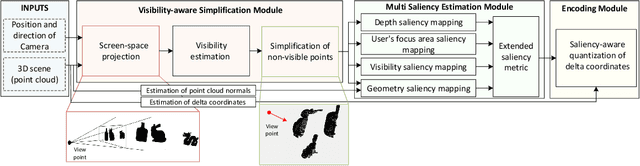

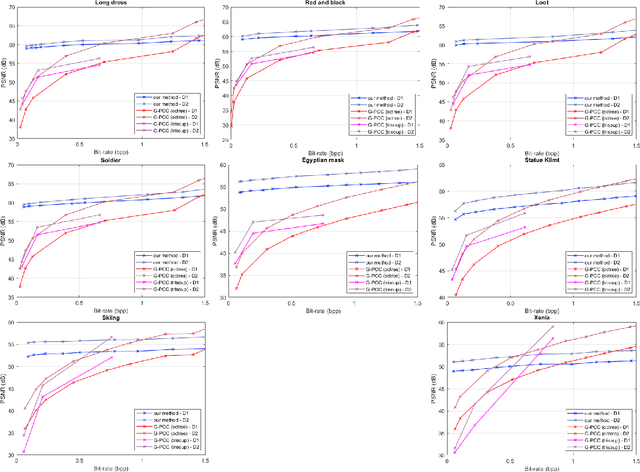
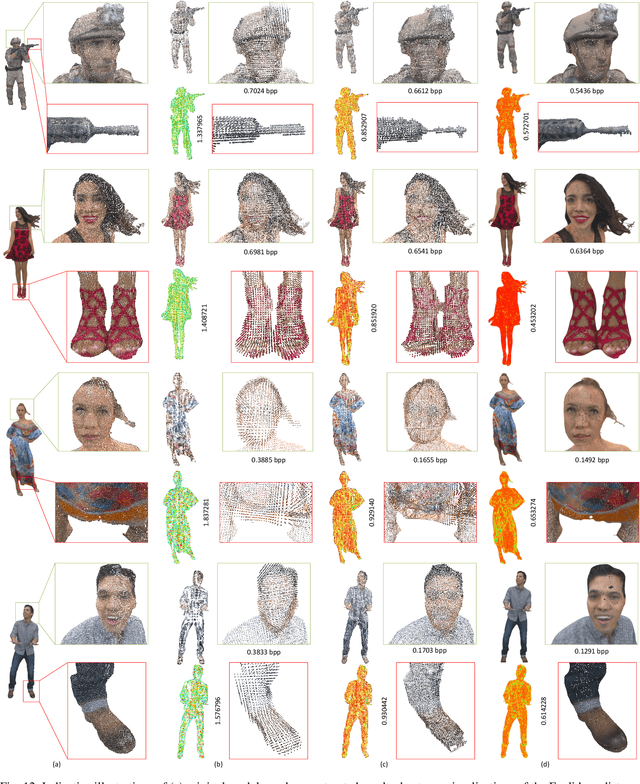
The increasing demand for accurate representations of 3D scenes, combined with immersive technologies has led point clouds to extensive popularity. However, quality point clouds require a large amount of data and therefore the need for compression methods is imperative. In this paper, we present a novel, geometry-based, end-to-end compression scheme, that combines information on the geometrical features of the point cloud and the user's position, achieving remarkable results for aggressive compression schemes demanding very small bit rates. After separating visible and non-visible points, four saliency maps are calculated, utilizing the point cloud's geometry and distance from the user, the visibility information, and the user's focus point. A combination of these maps results in a final saliency map, indicating the overall significance of each point and therefore quantizing different regions with a different number of bits during the encoding process. The decoder reconstructs the point cloud making use of delta coordinates and solving a sparse linear system. Evaluation studies and comparisons with the geometry-based point cloud compression (G-PCC) algorithm by the Moving Picture Experts Group (MPEG), carried out for a variety of point clouds, demonstrate that the proposed method achieves significantly better results for small bit rates.