 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordance as general value function: A computational model
Paper and Code
Oct 27, 2020
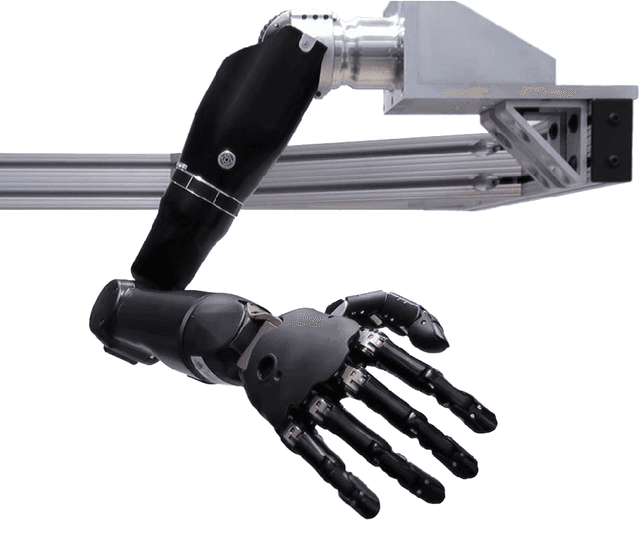
General value functions (GVFs) in the reinforcement learning (RL) literature are long-term predictive summaries of the outcomes of agents following specific policies in the environment. Affordances as perceived valences of action possibilities may be cast into predicted policy-relative goodness and modelled as GVFs. A systematic explication of this connection shows that GVFs and especially their deep learning embodiments (1) realize affordance prediction as a form of direct perception, (2) illuminate the fundamental connection between action and perception in affordance, and (3) offer a scalable way to learn affordances using RL methods. Through a comprehensive review of existing literature on recent successes of GVF applications in robotics, rehabilitation, industrial automation, and autonomous driving, we demonstrate that GVFs provide the right framework for learning affordances in real-world applications. In addition, we highlight a few new avenues of research opened up by the perspective of "affordance as GVF", including using GVFs for orchestrating complex behaviors.