 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Reinforcement Learning Framework for Benchmarking Collision Avoidance Mechanisms in Autonomous Vehicles
Paper and Code
Jun 04, 2018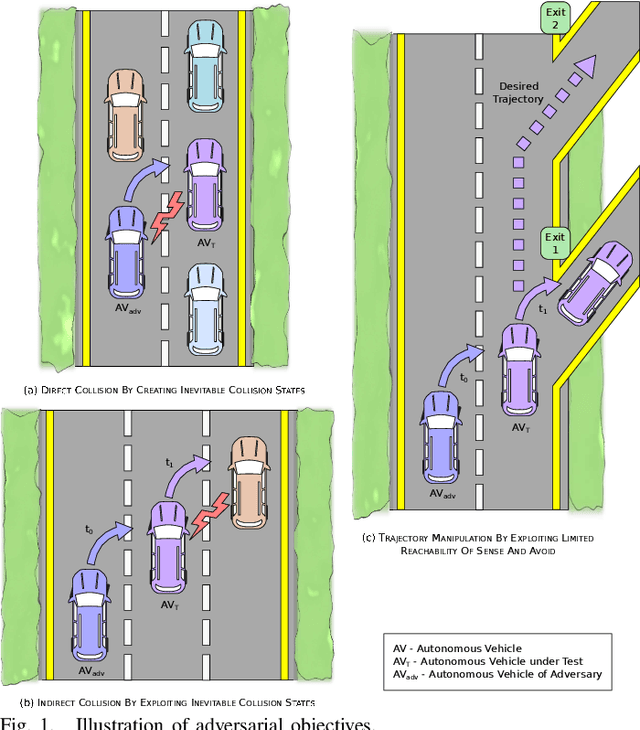


With the rapidly growing interest in autonomous navigation, the body of research on motion planning and collision avoidance techniques has enjoyed an accelerating rate of novel proposals and developments. However, the complexity of new techniques and their safety requirements render the bulk of current benchmarking frameworks inadequate, thus leaving the need for efficient comparison techniques unanswered. This work proposes a novel framework based on deep reinforcement learning for benchmarking the behavior of collision avoidance mechanisms under the worst-case scenario of dealing with an optimal adversarial agent, trained to drive the system into unsafe states. We describe the architecture and flow of this framework as a benchmarking solution, and demonstrate its efficacy via a practical case study of comparing the reliability of two collision avoidance mechanisms in response to intentional collision attempts.