 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Skills, Adaptive Partitions (ASAP)
Paper and Code
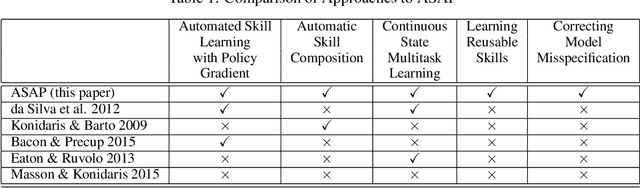
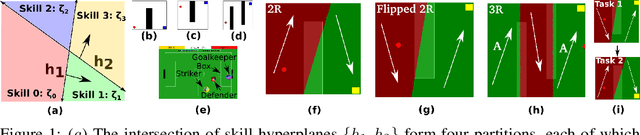
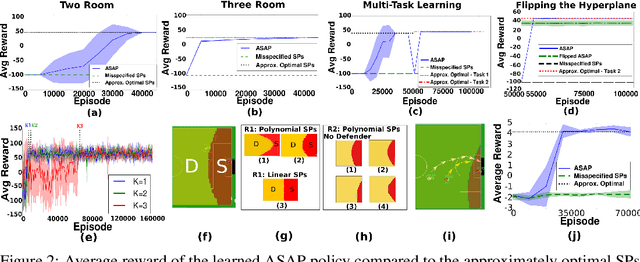
We introduce the Adaptive Skills, Adaptive Partitions (ASAP) framework that (1) learns skills (i.e., temporally extended actions or options) as well as (2) where to apply them. We believe that both (1) and (2) are necessary for a truly general skill learning framework, which is a key building block needed to scale up to lifelong learning agents. The ASAP framework can also solve related new tasks simply by adapting where it applies its existing learned skills. We prove that ASAP converges to a local optimum under natural conditions. Finally, our experimental results, which include a RoboCup domain, demonstrate the ability of ASAP to learn where to reuse skills as well as solve multiple tasks with considerably less experience than solving each task from scratch.