Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Localization using Bernstein Distribution Functions
Paper and Code
Oct 06, 2022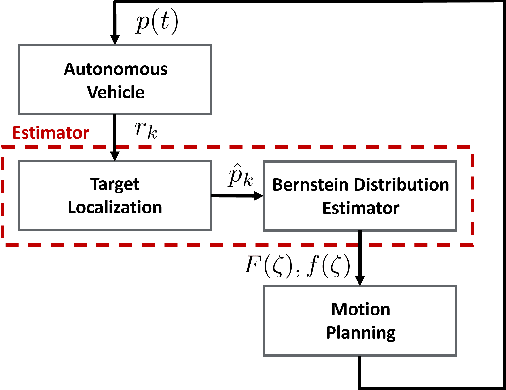

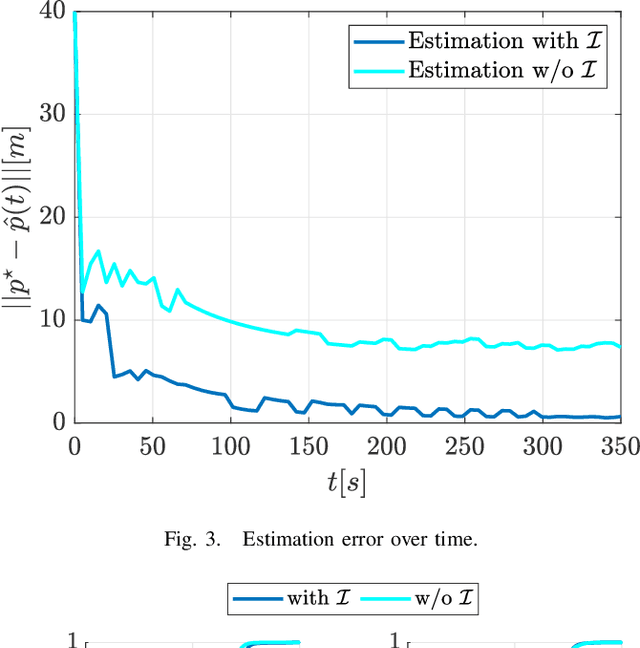
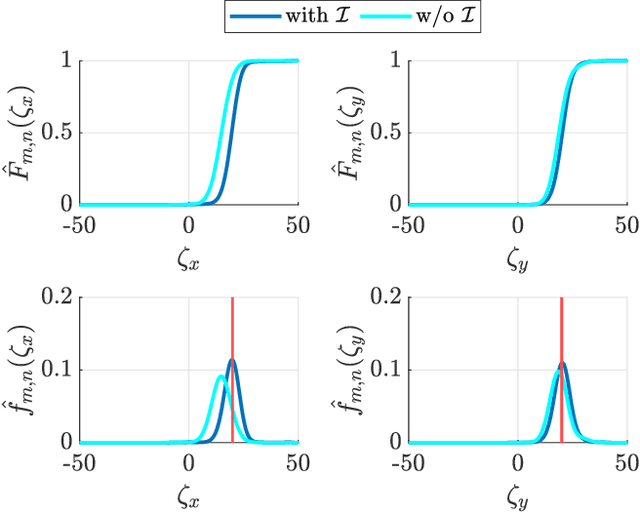
In this work, we present a framework that enables a vehicle to autonomously localize a target based on noisy range measurements computed from RSSI data. To achieve the mission objectives, we develop a control scheme composed of two main parts: an estimator and a motion planner. At each time step, new estimates of the target's position are computed and used to generate and update distribution functions using Bernstein polynomials. A metric of the efficiency of the estimator is derived based on the Fisher Information Matrix. Finally, the motion planning problem is formulated to react in real time to new information about the target and improve the estimator's performance.
* 6 pages
View paper on