Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive End-Effector Pose Selection for Tactile Object Recognition through Monte Carlo Tree Search
Paper and Code
Jul 30, 2017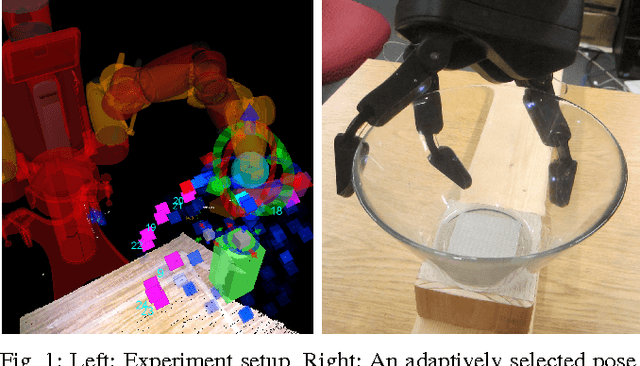
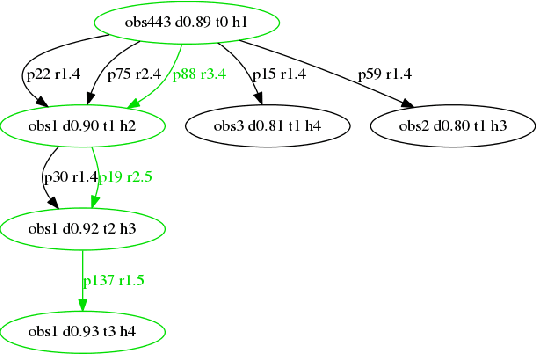
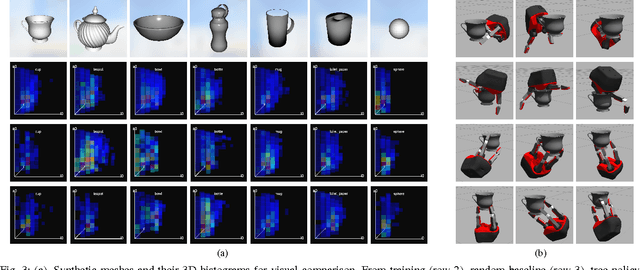
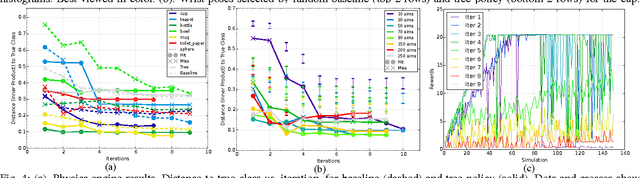
This paper considers the problem of active object recognition using touch only. The focus is on adaptively selecting a sequence of wrist poses that achieves accurate recognition by enclosure grasps. It seeks to minimize the number of touches and maximize recognition confidence. The actions are formulated as wrist poses relative to each other, making the algorithm independent of absolute workspace coordinates. The optimal sequence is approximated by Monte Carlo tree search. We demonstrate results in a physics engine and on a real robot. In the physics engine, most object instances were recognized in at most 16 grasps. On a real robot, our method recognized objects in 2--9 grasps and outperformed a greedy baseline.
* Accepted to International Conference on Intelligent Robots and
Systems (IROS) 2017
View paper on