 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Bayesian Multi-class Mapping from Range and Semantic Segmentation Observations
Paper and Code
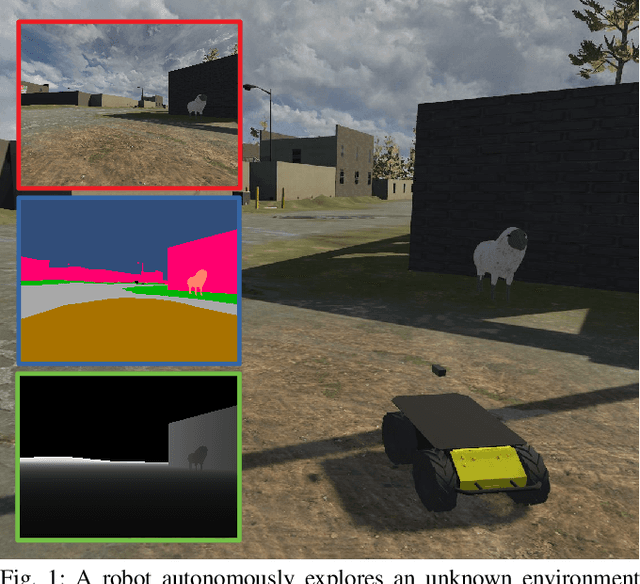
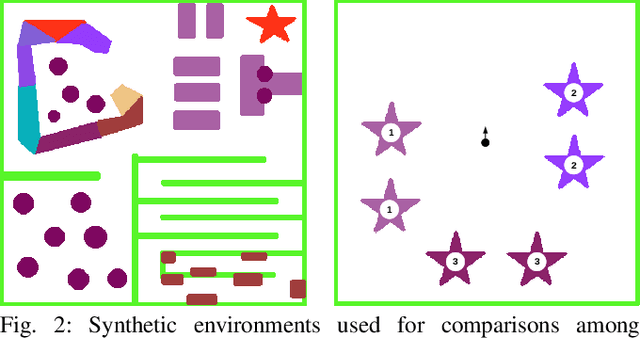
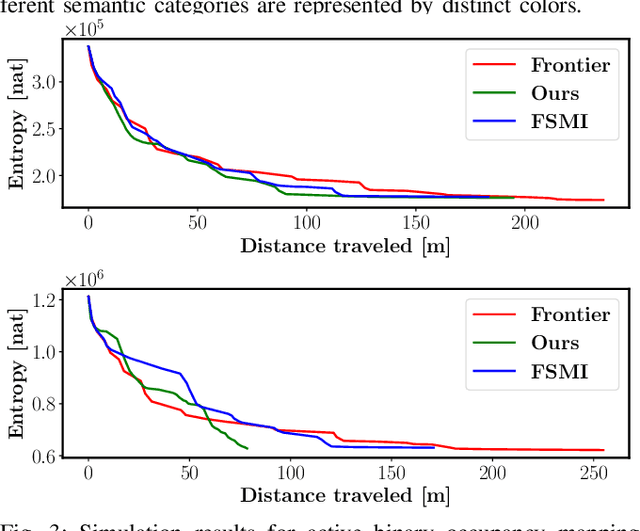
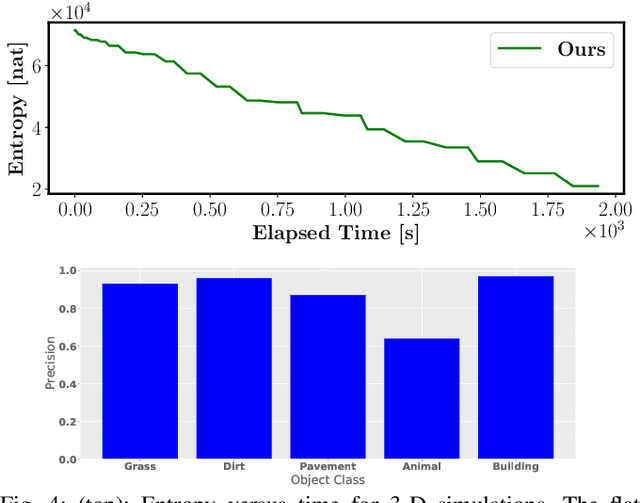
The demand for robot exploration in unstructured and unknown environments has recently grown substantially thanks to the host of inexpensive sensing and edge-computing solutions. In order to come closer to full autonomy, robots need to process the measurement stream in real-time, which calls for efficient exploration strategies. Information-based exploration techniques, such as Cauchy-Schwarz quadratic mutual information (CSQMI) and fast Shannon mutual information (FSMI), have successfully achieved active binary occupancy mapping with range measurements. However, as we envision robots performing complex tasks specified with semantically meaningful objects, it is necessary to capture semantic categories in the measurements, map representation, and exploration objective. In this work we propose a Bayesian multi-class mapping algorithm utilizing range-category measurements, as well as a closed-form efficiently computable lower bound for the Shannon mutual information between the multi-class map and the measurements. The bound allows rapid evaluation of many potential robot trajectories for autonomous exploration and mapping. Furthermore, we develop a compressed representation of 3-D environments with semantic labels based on OcTree data structure, where each voxel maintains a categorical distribution over object classes. The proposed 3-D representation facilitates fast computation of Shannon mutual information between the semantic Octomap and the measurements using Run-Length Encoding (RLE) of range-category observation rays. We compare our method against frontier-based and FSMI exploration and apply it in a variety of simulated and real-world experiments.