Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAction Detection from a Robot-Car Perspective
Paper and Code
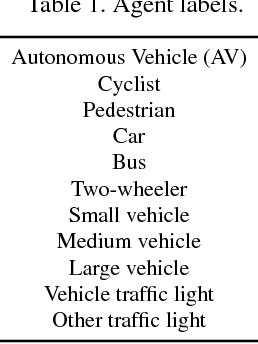
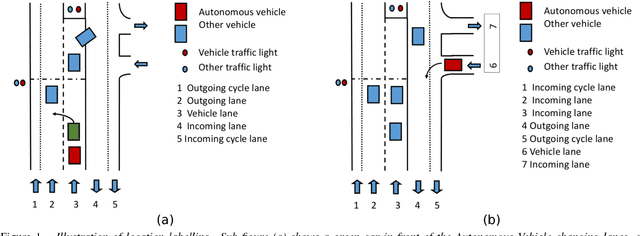
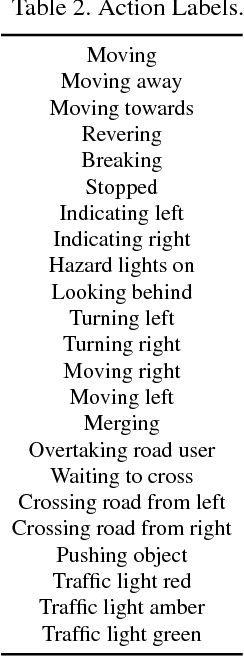
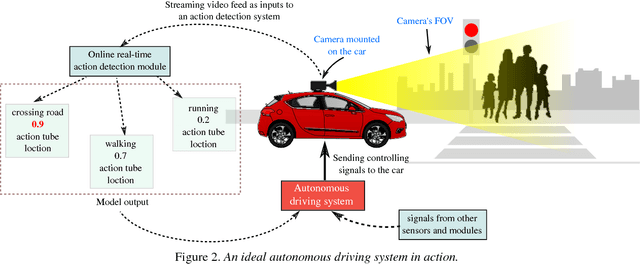
We present the new Road Event and Activity Detection (READ) dataset, designed and created from an autonomous vehicle perspective to take action detection challenges to autonomous driving. READ will give scholars in computer vision, smart cars and machine learning at large the opportunity to conduct research into exciting new problems such as understanding complex (road) activities, discerning the behaviour of sentient agents, and predicting both the label and the location of future actions and events, with the final goal of supporting autonomous decision making.
* intial version, more to come - soon
View paper on