Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Path Planning for Autonomous Driving with Hardware-assisted Memorization
Paper and Code
May 05, 2022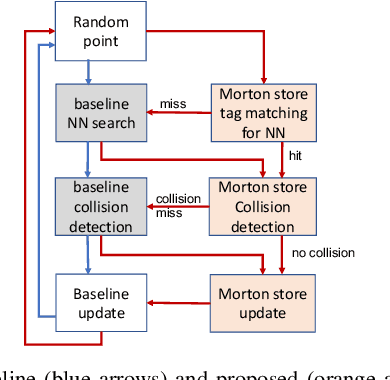
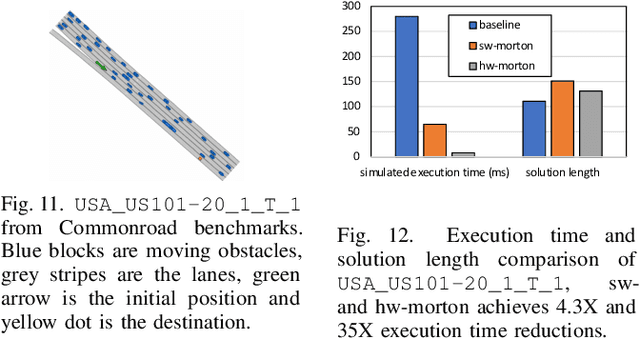
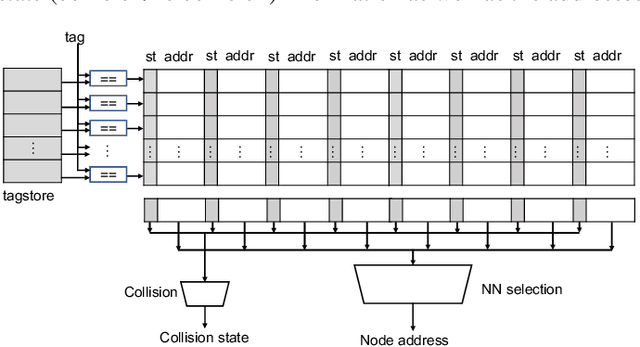
Path planning for autonomous driving with dynamic obstacles poses a challenge because it needs to perform a higher-dimensional search (including time) while still meeting real-time constraints. This paper proposes an algorithm-hardware co-optimization approach to accelerate path planning with high-dimensional search space. First, we reduce the time for a nearest neighbor search and collision detection by mapping nodes and obstacles to a lower-dimensional space and memorizing recent search results. Then, we propose a hardware extension for efficient memorization. The experimental results on a modern processor and a cycle-level simulator show that the execution time is reduced significantly.
View paper on