 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA wearable Gait Assessment Method for Lumbar Disc Herniation Based on Adaptive Kalman Filtering
Paper and Code
Dec 15, 2023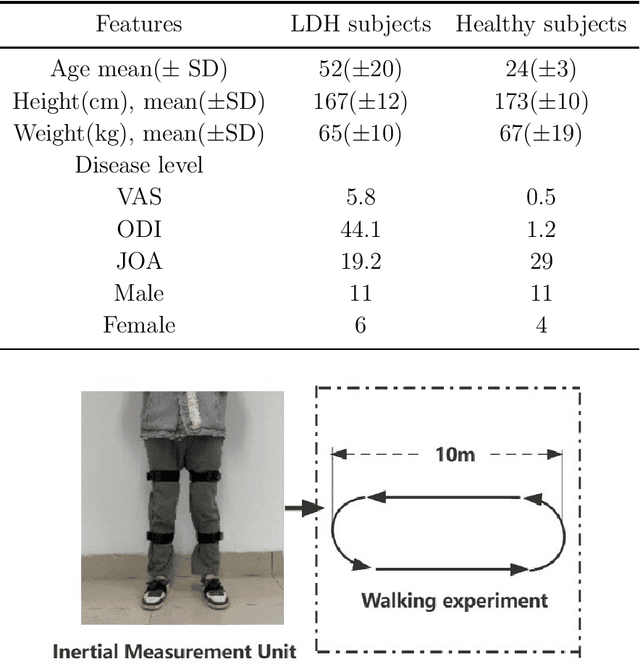
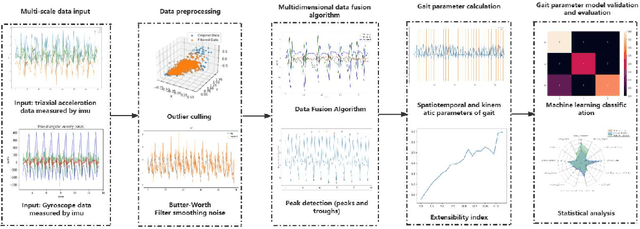
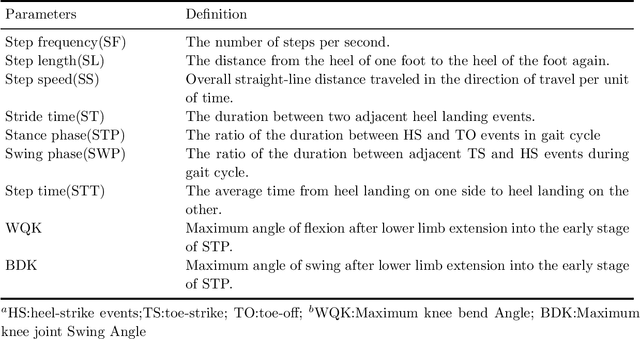
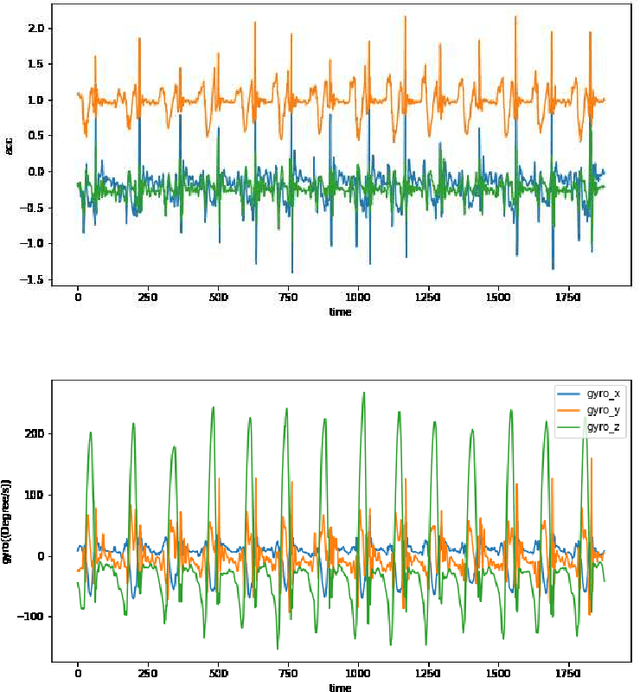
Lumbar disc herniation (LDH) is a prevalent orthopedic condition in clinical practice. Inertial measurement unit sensors (IMUs) are an effective tool for monitoring and assessing gait impairment in patients with lumbar disc herniation (LDH). However, the current gait assessment of LDH focuses solely on single-source acceleration signal data, without considering the diversity of sensor data. It also overlooks the individual differences in motor function deterioration between the healthy and affected lower limbs in patients with LDH. To address this issue, we developed an LDH gait feature model that relies on multi-source adaptive Kalman data fusion of acceleration and angular velocity. We utilized an adaptive Kalman data fusion algorithm for acceleration and angular velocity to estimate the attitude angle and segment the gait phase. Two Inertial Measurement Units (IMUs) were used to analyze the gait characteristics of patients with lumbar disc issues and healthy individuals. This analysis included 12 gait characteristics, such as gait spatiotemporal parameters, kinematic parameters, and expansibility index numbers. Statistical methods were employed to analyze the characteristic model and confirm the biological differences between the healthy affected side of LDH and healthy subjects. Finally, a classifier based on feature engineering was utilized to classify the gait patterns of the affected side of patients with lumbar disc disease and healthy subjects. This approach achieved a classification accuracy of 95.50%, enhancing the recognition of LDH and healthy gait patterns. It also provided effective gait feature sets and methods for assessing LDH clinically.