Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Approach of Observability Analysis for Airborne SLAM
Paper and Code
Jul 26, 2012
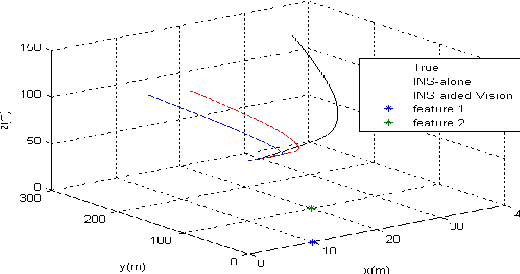
Observability is a key aspect of the state estimation problem of SLAM, However, the dimension and variables of SLAM system might be changed with new features, to which little attention is paid in the previous work. In this paper, a unified approach of observability analysis for SLAM system is provided, whether the dimension and variables of SLAM system are changed or not, we can use this approach to analyze the local or total observability of the SLAM system.
View paper on