 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified and Modular Model Predictive Control Framework for Soft Continuum Manipulators under Internal and External Constraints
Paper and Code
Apr 28, 2022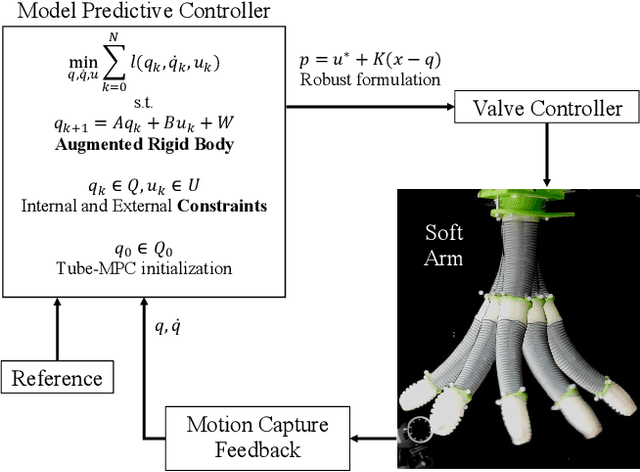
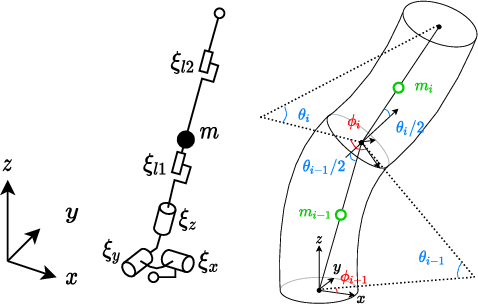
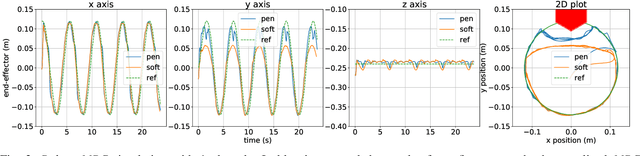
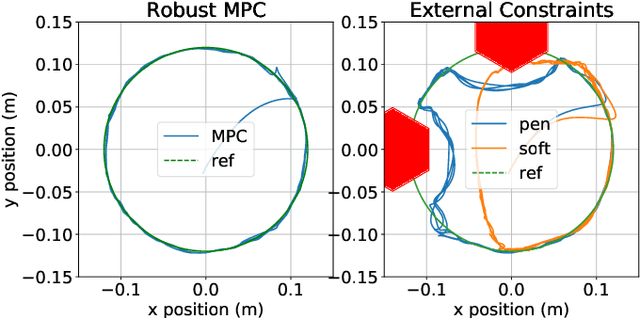
The emerging field of fluidically actuated soft robotic control has promising capabilities such as inherent compliance and user safety. However, these are counterbalanced by issues not common to rigid robots, like nonlinear actuation dynamics, motion constraints, workspace limitations, and variable shape stiffness. In this work, we have adapted Model Predictive Control (MPC), that has recently seen an exponential rise in popularity and fields of applications, to a soft robotic arm called SoPrA. We have addressed the problems that current control methods are facing, trying to propose a unique environment to handle them in a modular way. This work shows, both with simulation and experimental results, that Task-Space MPC can be successfully implemented for dynamic soft robotic control, while past research has usually focused on Joint-Space references. We have provided a way to couple the Piece-wise Constant Curvature and the Augmented Rigid Body Model assumptions with internal and external constraints and actuation dynamics, delivering an algorithm that can manage all these information and optimize over them. We believe that an MPC implementation based on our approach could be the way to address most of model-based soft robotics control issues within a unified and modular framework, while allowing to include improvements that usually belong to other control domains such as learning techniques.