 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Approach For Kinematic Design Of Upper Limb Rehabilitation Exoskeletons
Paper and Code
Dec 13, 2017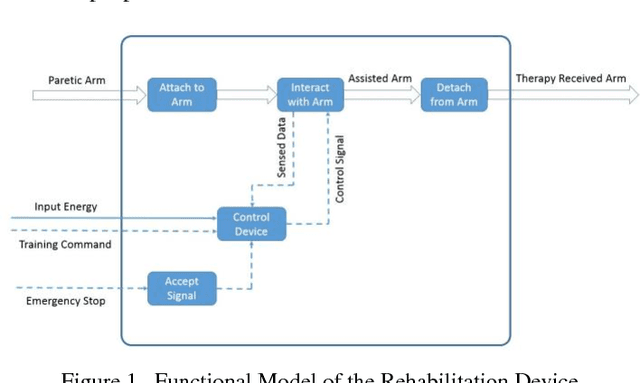
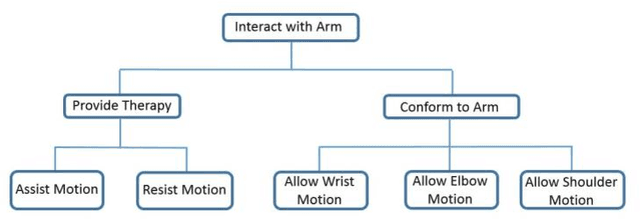

Kinematic structure of an exoskeleton is the most fundamental block of its design and is determinant of many functional capabilities of it. Although numerous upper limb rehabilitation devices have been designed in the recent years, there is not a framework that can systematically guide the kinematic design procedure. Additionally, diversity of currently available devices and the many minute details incorporated to address certain design requirements hinders pinpointing the core kinematics of the available devices to compare them against each other. This makes the review of literature for identifying drawbacks of the state of the art systems a challenging and puzzling task. In fact, lack of a unifying framework makes designing rehabilitation devices an intuitive process and prone to biases from currently available designs. This research work proposes a systematic approach for kinematic design of upper limb rehabilitation exoskeletons based on conceptual design techniques. Having defined a solution neutral problem statement based on the characteristics of an ideal device, the main functionality of the system is divided into smaller functional units via the Functional Decomposition Method. Various directions for concept generation are explored and finally, it has been shown that a vast majority of the current exoskeleton designs fit within the proposed design framework and the defined functionalities.