 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA System for Generalized 3D Multi-Object Search
Paper and Code
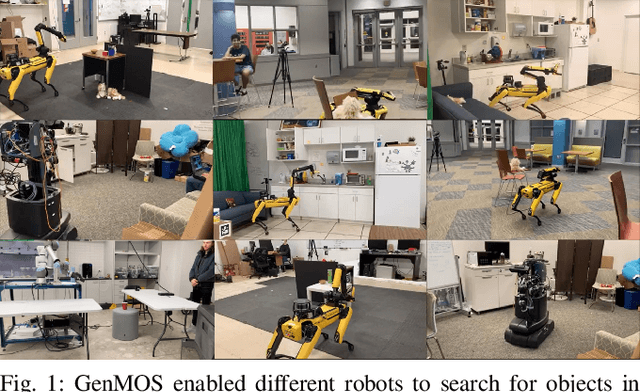



Searching for objects is a fundamental skill for robots. As such, we expect object search to eventually become an off-the-shelf capability for robots, similar to e.g., object detection and SLAM. In contrast, however, no system for 3D object search exists that generalizes across real robots and environments. In this paper, building upon a recent theoretical framework that exploited the octree structure for representing belief in 3D, we present GenMOS (Generalized Multi-Object Search), the first general-purpose system for multi-object search (MOS) in a 3D region that is robot-independent and environment-agnostic. GenMOS takes as input point cloud observations of the local region, object detection results, and localization of the robot's view pose, and outputs a 6D viewpoint to move to through online planning. In particular, GenMOS uses point cloud observations in three ways: (1) to simulate occlusion; (2) to inform occupancy and initialize octree belief; and (3) to sample a belief-dependent graph of view positions that avoid obstacles. We evaluate our system both in simulation and on two real robot platforms. Our system enables, for example, a Boston Dynamics Spot robot to find a toy cat hidden underneath a couch in under one minute. We further integrate 3D local search with 2D global search to handle larger areas, demonstrating the resulting system in a 25m$^2$ lobby area.