 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Open Problems for Mobile Robots
Paper and Code
Nov 07, 2011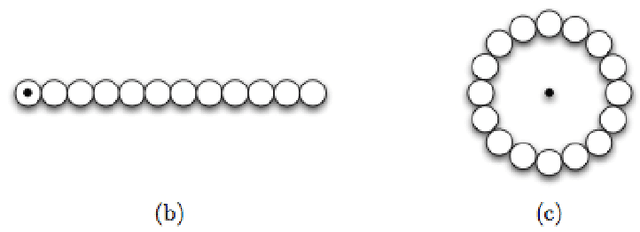
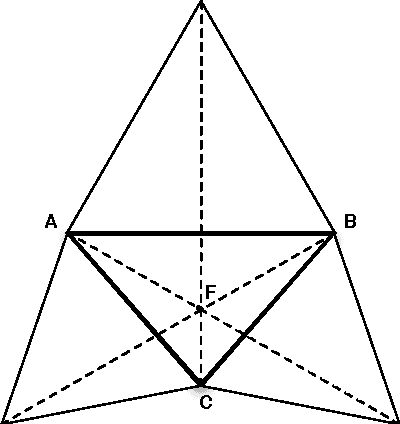
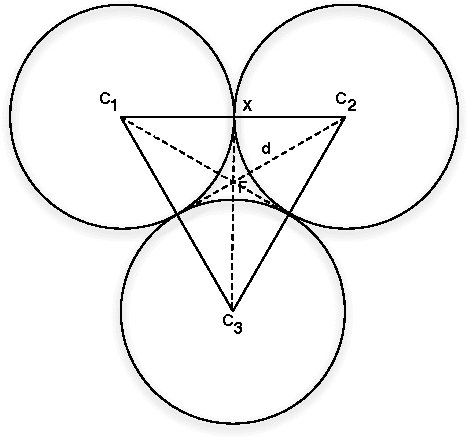
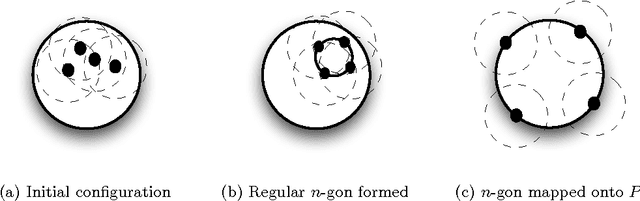
Gathering mobile robots is a widely studied problem in robotic research. This survey first introduces the related work, summarizing models and results. Then, the focus shifts on the open problem of gathering fat robots. In this context, "fat" means that the robot is not represented by a point in a bidimensional space, but it has an extent. Moreover, it can be opaque in the sense that other robots cannot "see through" it. All these issues lead to a redefinition of the original problem and an extension of the CORDA model. For at most 4 robots an algorithm is provided in the literature, but is gathering always possible for n>4 fat robots? Another open problem is considered: Boundary Patrolling by mobile robots. A set of mobile robots with constraints only on speed and visibility is working in a polygonal environment having boundary and possibly obstacles. The robots have to perform a perpetual movement (possibly within the environment) so that the maximum timespan in which a point of the boundary is not being watched by any robot is minimized.