 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Single-Planner Approach to Multi-Modal Humanoid Mobility
Paper and Code
Jan 30, 2018

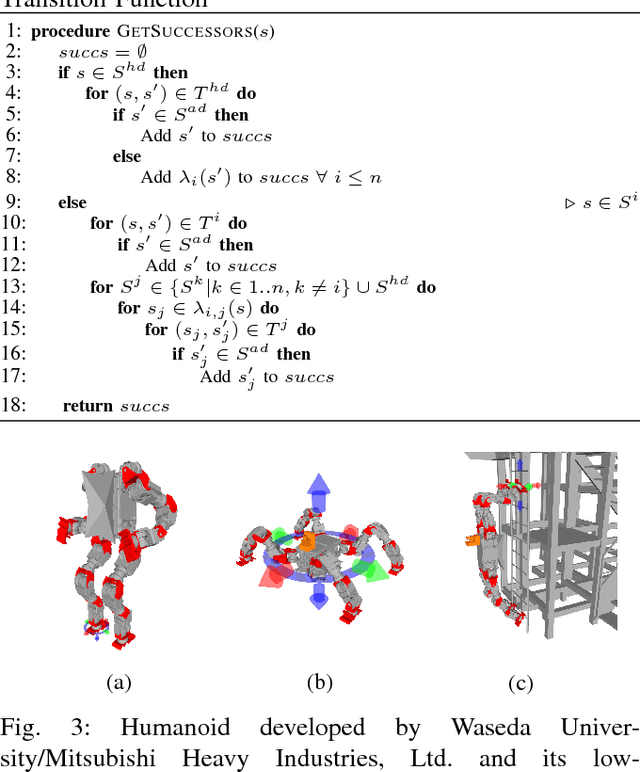
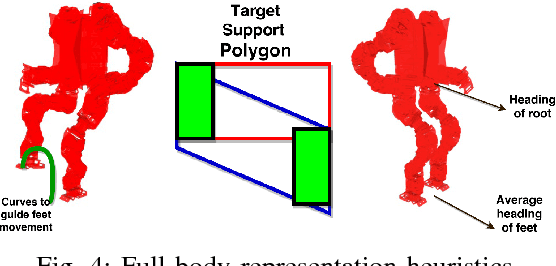
In this work, we present an approach to planning for humanoid mobility. Humanoid mobility is a challenging problem, as the configuration space for a humanoid robot is intractably large, especially if the robot is capable of performing many types of locomotion. For example, a humanoid robot may be able to perform such tasks as bipedal walking, crawling, and climbing. Our approach is to plan for all these tasks within a single search process. This allows the search to reason about all the capabilities of the robot at any point, and to derive the complete solution such that the plan is guaranteed to be feasible. A key observation is that we often can roughly decompose a mobility task into a sequence of smaller tasks, and focus planning efforts to reason over much smaller search spaces. To this end, we leverage the results of a recently developed framework for planning with adaptive dimensionality, and incorporate the capabilities of available controllers directly into the planning process. The resulting planner can also be run in an interleaved fashion alongside execution so that time spent idle is much reduced.