Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Safety and Passivity Filter for Robot Teleoperation Systems
Paper and Code
Feb 17, 2021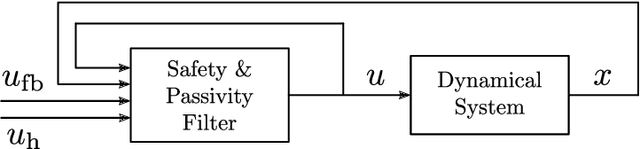
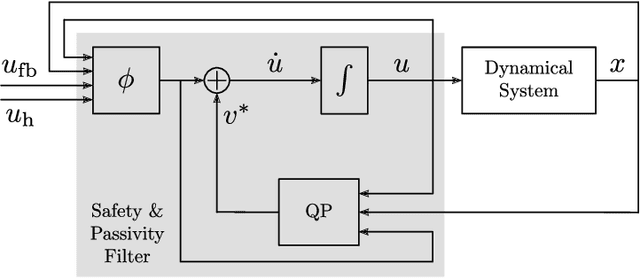
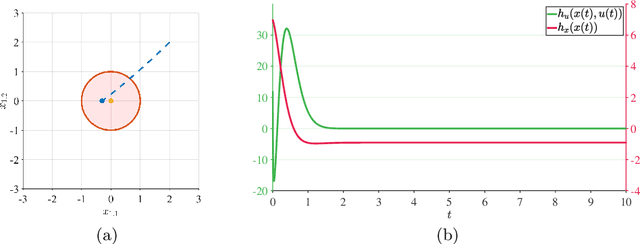
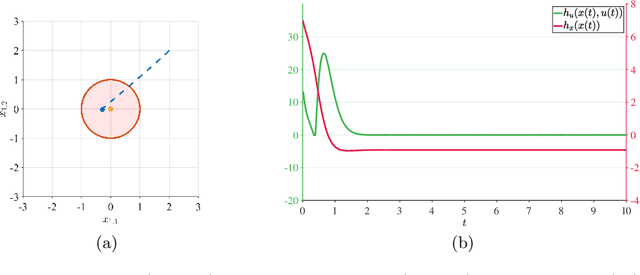
In this paper, we present a way of enforcing safety and passivity properties of robot teleoperation systems, where a human operator interacts with a dynamical system modeling the robot. The approach does so in a holistic fashion, by combining safety and passivity constraints in a single optimization-based controller which effectively filters the desired control input before supplying it to the system. The result is a safety and passivity filter implemented as a convex quadratic program which can be solved efficiently and employed in an online fashion in many robotic teleoperation applications. Simulation results show the benefits of the approach developed in this paper applied to the human teleoperation of a second-order dynamical system.
View paper on