 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Random Geometric Model of Blockages in Vehicular Networks
Paper and Code
Aug 24, 2021

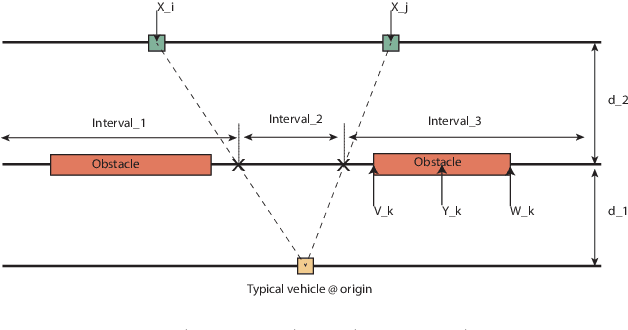
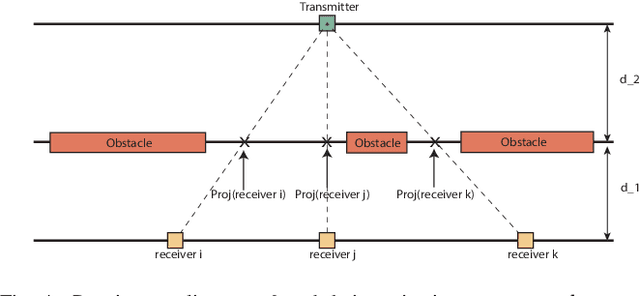
This paper presents a novel spatially consistent approach for modeling line-of-sight (LOS) paths in vehicular networks. We use stochastic geometry to model transmitters, obstacles, and receivers located in three parallel lines, respectively. Their geometric interactions are leveraged to characterize the existence of LOS paths. Specifically, the proposed approach focuses on the role of obstacles in blocking one or more LOS paths, which has been overlooked in most statistical models for blockage. Under the proposed framework, we derive the probability that a typical vehicle is in LOS with respect to transmitters with received signal-to-noise ratios greater than a threshold. The proposed framework and LOS coverage analysis are instrumental to the analysis of LOS-critical applications such as positioning or mmWave communications in vehicular networks.