Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Non-Iterative Solution to the Four-Point Three-Views Pose Problem in Case of Collinear Cameras
Paper and Code
Sep 14, 2011

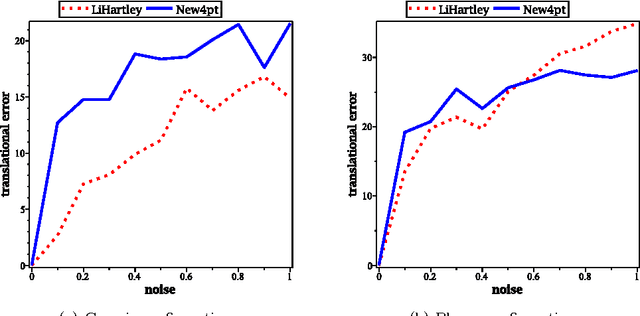
We give a non-iterative solution to a particular case of the four-point three-views pose problem when three camera centers are collinear. Using the well-known Cayley representation of orthogonal matrices, we derive from the epipolar constraints a system of three polynomial equations in three variables. The eliminant of that system is a multiple of a 36th degree univariate polynomial. The true (unique) solution to the problem can be expressed in terms of one of real roots of that polynomial. Experiments on synthetic data confirm that our method is robust enough even in case of planar configurations.
* 12 pages, 5 figures
View paper on