 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Type-II Fuzzy Logic Based Controller for Non-linear Dynamical Systems with Application to a 3-PSP Parallel Robot
Paper and Code
Dec 05, 2016
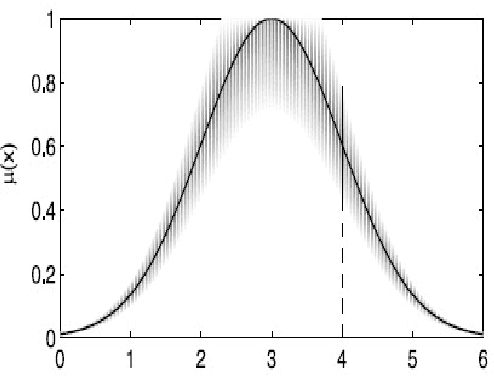

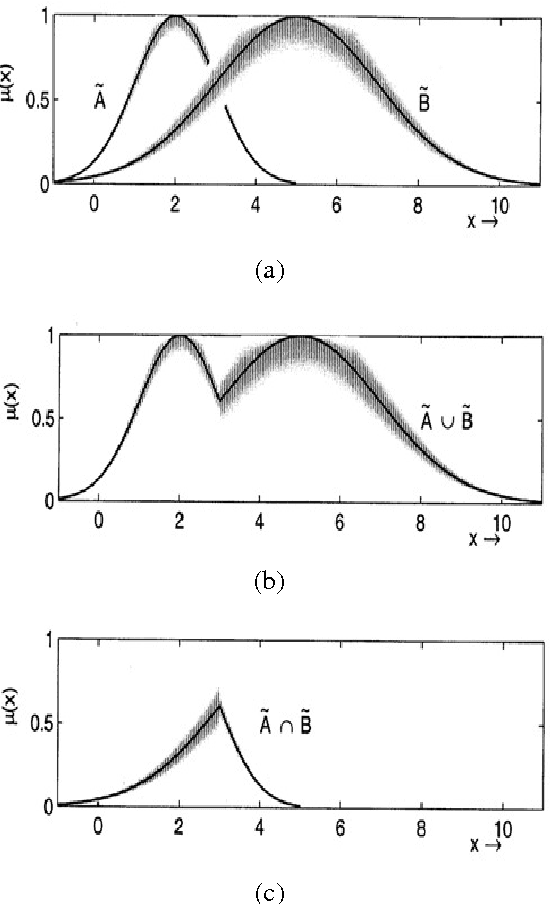
The concept of uncertainty is posed in almost any complex system including parallel robots as an outstanding instance of dynamical robotics systems. As suggested by the name, uncertainty, is some missing information that is beyond the knowledge of human thus we may tend to handle it properly to minimize the side-effects through the control process. Type-II fuzzy logic has shown its superiority over traditional fuzzy logic when dealing with uncertainty. Type-II fuzzy logic controllers are however newer and more promising approaches that have been recently applied to various fields due to their significant contribution especially when noise (as an important instance of uncertainty) emerges. During the design of Type-I fuzzy logic systems, we presume that we are almost certain about the fuzzy membership functions which is not true in many cases. Thus T2FLS as a more realistic approach dealing with practical applications might have a lot to offer. Type-II fuzzy logic takes into account a higher level of uncertainty, in other words, the membership grade for a type-II fuzzy variable is no longer a crisp number but rather is itself a type-I linguistic term. In this thesis the effects of uncertainty in dynamic control of a parallel robot is considered. More specifically, it is intended to incorporate the Type-II Fuzzy Logic paradigm into a model based controller, the so-called computed torque control method, and apply the result to a 3 degrees of freedom parallel manipulator. ...