 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Tightly-Coupled Dual-VIO for a Mobile Manipulator With Dynamic Locomotion
Paper and Code
Jul 18, 2024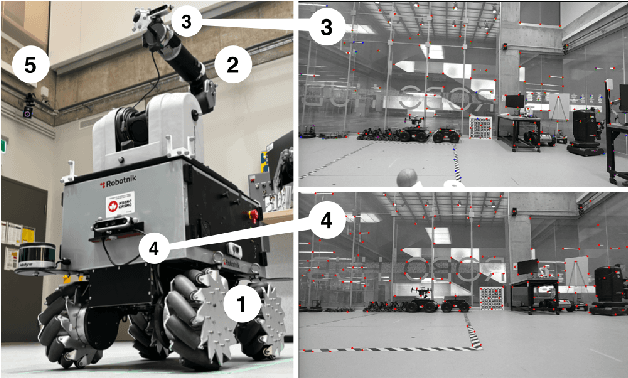
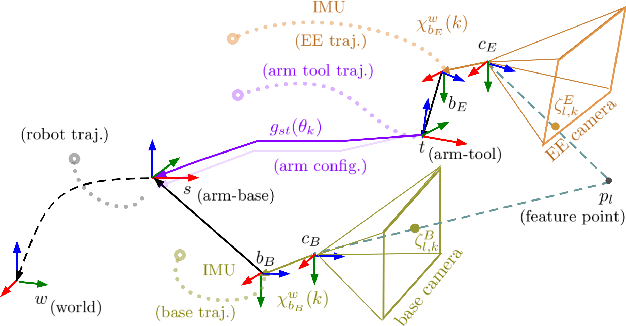
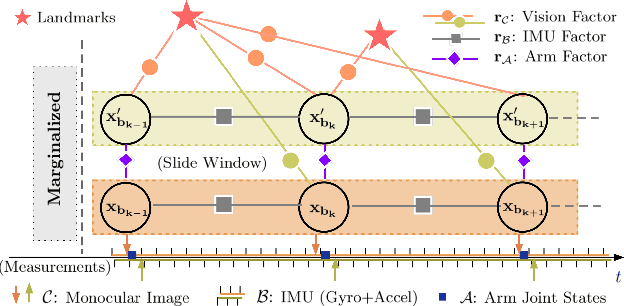
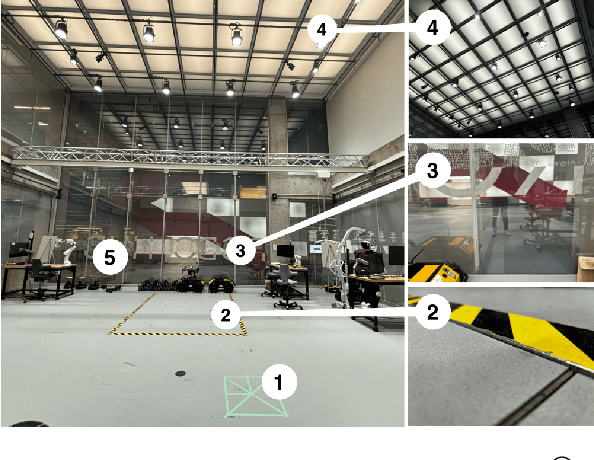
This paper introduces a new dual monocular visualinertial odometry (dual-VIO) strategy for a mobile manipulator operating under dynamic locomotion, i.e. coordinated movement involving both the base platform and the manipulator arm. Our approach has been motivated by challenges arising from inaccurate estimation due to coupled excitation when the mobile manipulator is engaged in dynamic locomotion in cluttered environments. The technique maintains two independent monocular VIO modules, with one at the mobile base and the other at the end-effector (EE), which are tightly coupled at the low level of the factor graph. The proposed method treats each monocular VIO with respect to each other as a positional anchor through arm-kinematics. These anchor points provide a soft geometric constraint during the VIO pose optimization. This allows us to stabilize both estimators in case of instability of one estimator in highly dynamic locomotions. The performance of our approach has been demonstrated through extensive experimental testing with a mobile manipulator tested in comparison to running dual VINS-Mono in parallel. We envision that our method can also provide a foundation towards active-SLAM (ASLAM) with a new perspective on multi-VIO fusion and system redundancy.