 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Approach to Training Multiple Cooperative Agents for Autonomous Driving
Paper and Code
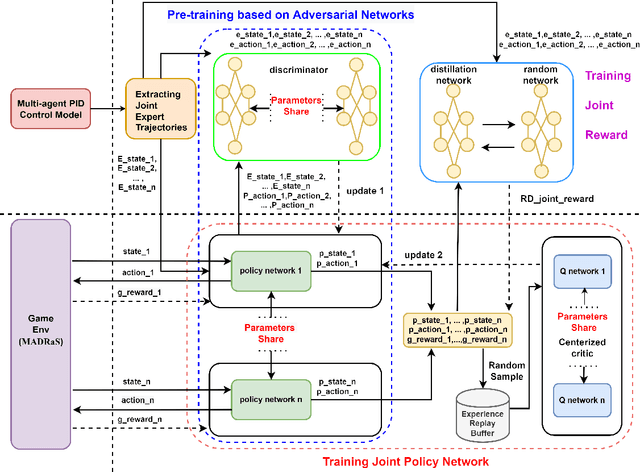
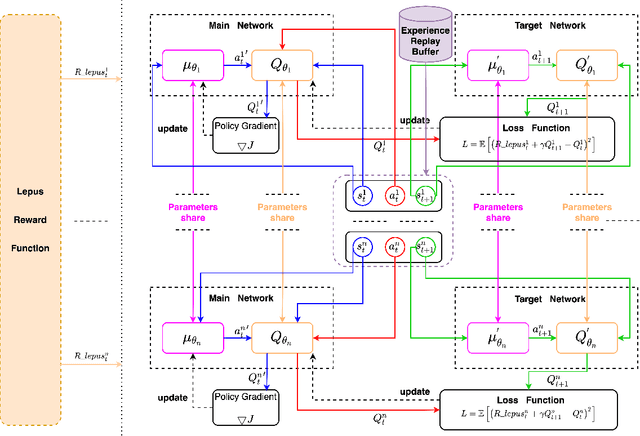
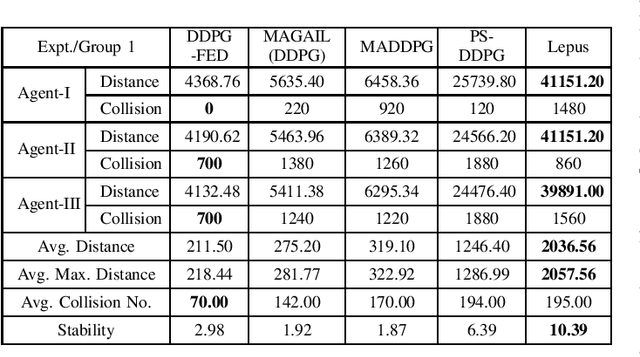
Training multiple agents to perform safe and cooperative control in the complex scenarios of autonomous driving has been a challenge. For a small fleet of cars moving together, this paper proposes Lepus, a new approach to training multiple agents. Lepus adopts a pure cooperative manner for training multiple agents, featured with the shared parameters of policy networks and the shared reward function of multiple agents. In particular, Lepus pre-trains the policy networks via an adversarial process, improving its collaborative decision-making capability and further the stability of car driving. Moreover, for alleviating the problem of sparse rewards, Lepus learns an approximate reward function from expert trajectories by combining a random network and a distillation network. We conduct extensive experiments on the MADRaS simulation platform. The experimental results show that multiple agents trained by Lepus can avoid collisions as many as possible while driving simultaneously and outperform the other four methods, that is, DDPG-FDE, PSDDPG, MADDPG, and MAGAIL(DDPG) in terms of stability.