 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mixed-Integer Linear Programming Formulation for Human Multi-Robot Task Allocation
Paper and Code
Jun 12, 2021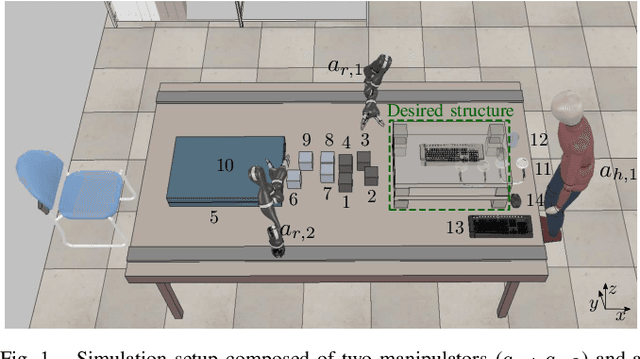

In this work, we address a task allocation problem for human multi-robot settings. Given a set of tasks to perform, we formulate a general Mixed-Integer Linear Programming (MILP) problem aiming at minimizing the overall execution time while optimizing the quality of the executed tasks as well as human and robotic workload. Different skills of the agents, both human and robotic, are taken into account and human operators are enabled to either directly execute tasks or play supervisory roles; moreover, multiple manipulators can tightly collaborate if required to carry out a task. Finally, as realistic in human contexts, human parameters are assumed to vary over time, e.g., due to increasing human level of fatigue. Therefore, online monitoring is required and re-allocation is performed if needed. Simulations in a realistic scenario with two manipulators and a human operator performing an assembly task validate the effectiveness of the approach.