Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Minimal Six-Point Auto-Calibration Algorithm
Paper and Code
Jul 14, 2013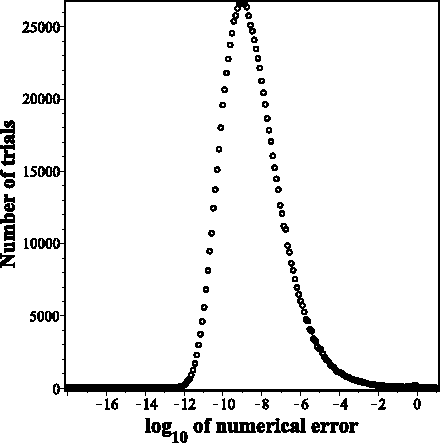
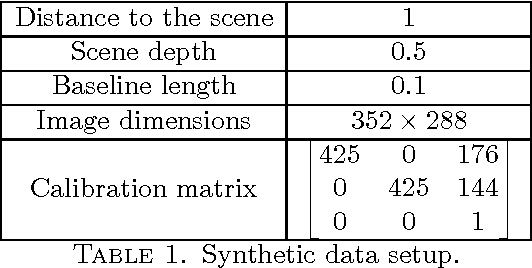
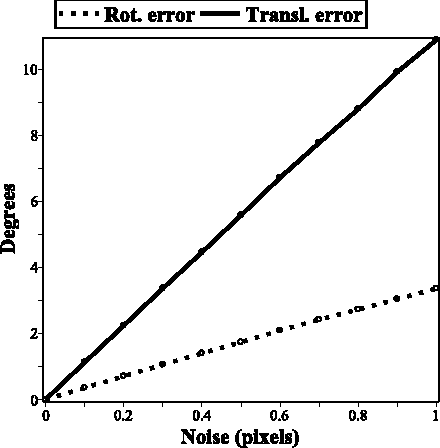

A non-iterative auto-calibration algorithm is presented. It deals with a minimal set of six scene points in three views taken by a camera with fixed but unknown intrinsic parameters. Calibration is based on the image correspondences only. The algorithm is implemented and validated on synthetic image data.
* Proceedings of the 23rd International Conference on Computer
Graphics and Vision, September 16-20, 2013 Vladivostok, Russia * 7 pages, 4 figures
View paper on