 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA lightweight YOLOv5-FFM model for occlusion pedestrian detection
Paper and Code
Aug 13, 2024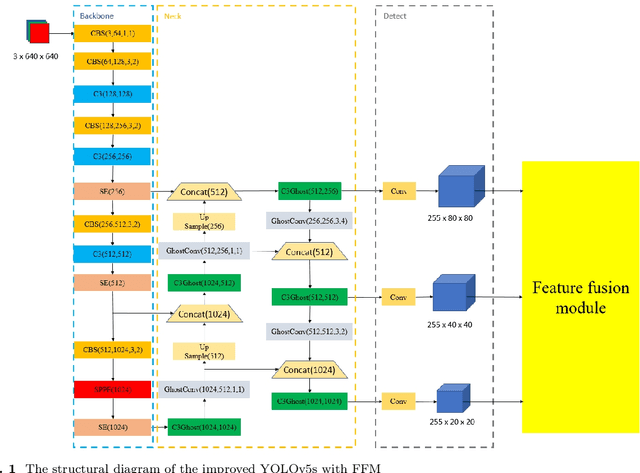



The development of autonomous driving technology must be inseparable from pedestrian detection. Because of the fast speed of the vehicle, the accuracy and real-time performance of the pedestrian detection algorithm are very important. YOLO, as an efficient and simple one-stage target detection method, is often used for pedestrian detection in various environments. However, this series of detectors face some challenges, such as excessive computation and undesirable detection rate when facing occluded pedestrians. In this paper, we propose an improved lightweight YOLOv5 model to deal with these problems. This model can achieve better pedestrian detection accuracy with fewer floating-point operations (FLOPs), especially for occluded targets. In order to achieve the above goals, we made improvements based on the YOLOv5 model framework and introduced Ghost module and SE block. Furthermore, we designed a local feature fusion module (FFM) to deal with occlusion in pedestrian detection. To verify the validity of our method, two datasets, Citypersons and CUHK Occlusion, were selected for the experiment. The experimental results show that, compared with the original yolov5s model, the average precision (AP) of our method is significantly improved, while the number of parameters is reduced by 27.9% and FLOPs are reduced by 19.0%.